8 Bayesian Decision Theory¶
Prior¶
- A priori (prior) probability of the state of nature
- Random variable (State of nature is unpredictable)
- Reflects our prior knowledge about how likely we are to observe a sea bass or salmon
- The catch of salmon and sea bass is equiprobable
- \(P(w_1)=P(w_2)\) uniform priors
- \(P(w_1)+P(w_2)=1\) exclusivity and exhaustively
- 只有先验时:选择概率较大的那一个为结果,错误率为概率小的另一个
Likelihood¶
- 假设我们知道要分类物体的某个特征,比如鱼表面的颜色,这时候\(p(x|w_1)\)就表示种类是1的时候有x特征的概率,这个概率就是likelihood
- maximum likelihood decision: assign input pattern \(x\) to class \(w_1\) if \(p(x|w_1)>p(x|w_2)\)
Posterior¶
- Posterior = (Likelihood x Prior) / Evidence \(p(w_i|x)=\dfrac{p(x|w_i)p(w_i)}{p(x)}\)
- Evidence \(p(x)\) can be viewed as a scale factor that guarantees that the posterior probabilities sum to 1
Optimal Bayes Decision Rule¶
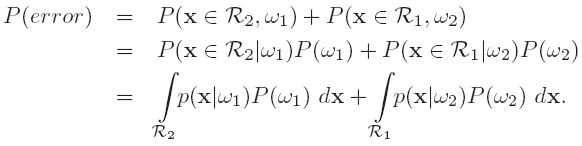
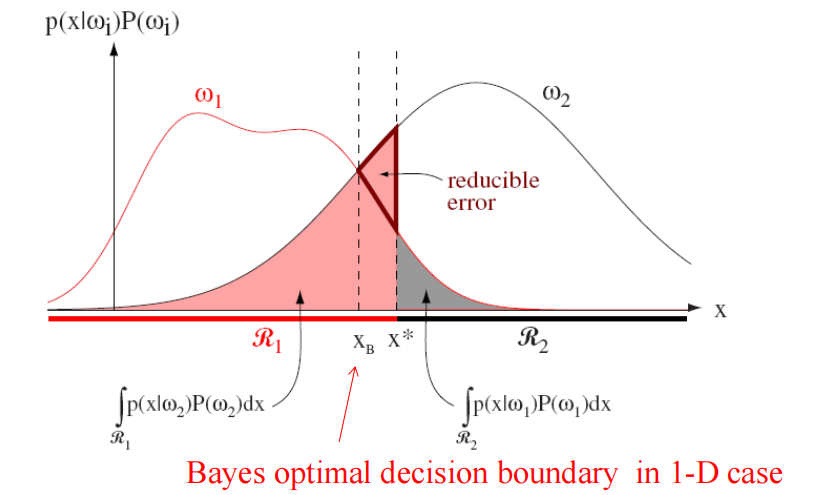
Generalization¶
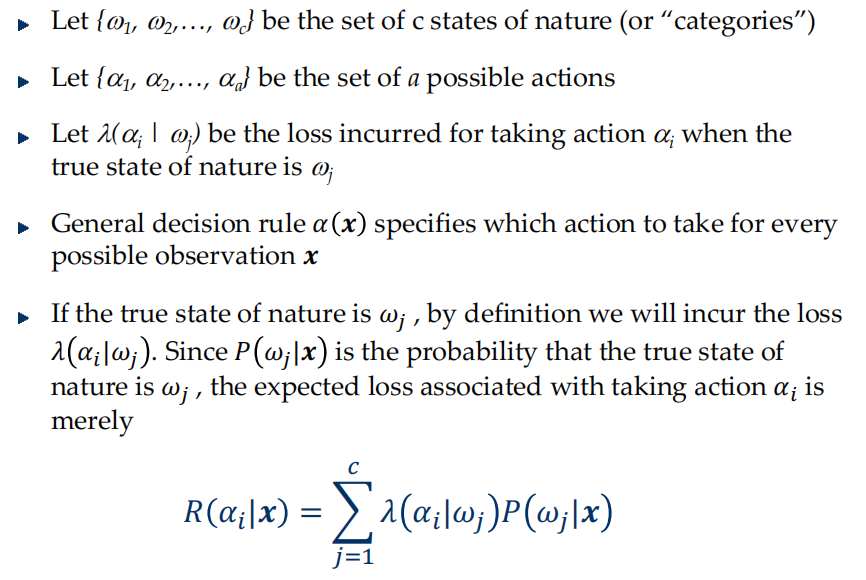
- overall risk: \(R=\int R(\alpha_i|x)p(x)dx\)
- Bayes risk = best performance that can be achieved
- conditional risk: \(R(\alpha_i|x)=\sum\limits_{j=1}^c\lambda(\alpha_i|w_j)P(w_j|x)\)
- 选择使\(R(\alpha_i|x)\)最小的action
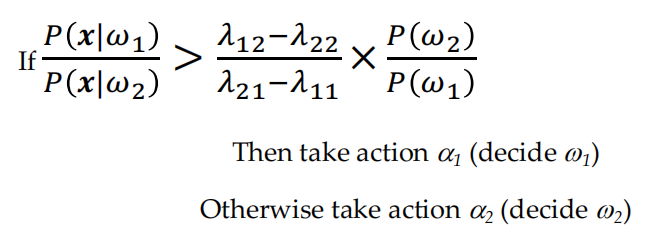
- two-category classification
- If the likelihood ratio exceeds a threshold value that is independent of the input pattern x, we can take optimal actions
- Minimum-Error-Rate Classification
- actions are decisions on classes
- seek a decision rule that minimizes the probability of error or the error rate
- Zero-one (0-1) loss function: no loss for correct decision and a unit loss for any error
- 这时候conditional risk \(R(\alpha_i|x)=1-P(w_i|x)\),所以最小化risk等于最大化后验概率
- 在前面我们选择后验概率最大的作为选择,我们可以进一步抽象,把选择哪一类的称为discriminant functions \(g_i(x)\)
- $P(w_1|x) $ -> \(p(x|w_1)P(w_1)\) -> \(\ln p(x|w_1)+\ln P(w_1)\) -> \(g(x)=P(w_1|x)-P(w_2|x)\) -> \(g(x)=\ln\dfrac{p(x|w_1)}{p(x|w_2)}+\ln\dfrac{P(w_1)}{P(w_2)}\)
- MLE: Best parameters are obtained by maximizing the probability of obtaining the samples observed
-
Log-likelihood
\[ l(\theta)=\ln p(D|\theta) \ \ \ \ p(D|\theta)=\prod^n_{k=1}p(x_k|\theta)\newline l(\theta)=\sum_{k=1}^n\ln p(x_k|\theta)\newline \theta^*=arg\max_{\theta} l(\theta) \]- set of necessary conditions for an optimum is \(\nabla_{\theta}l=0\)
-
Bayesian learning
- goal: estimating \(p(x|w_i), p(x|D_i), p(x|w_i, D_i)\)
- Use a set D of samples drawn independently according to the fixed but unknown probability distribution \(p(x)\) to determine 已知分布,但不知道具体参数,因此相当于\(p(x|\theta)\)已知
-
General Theory
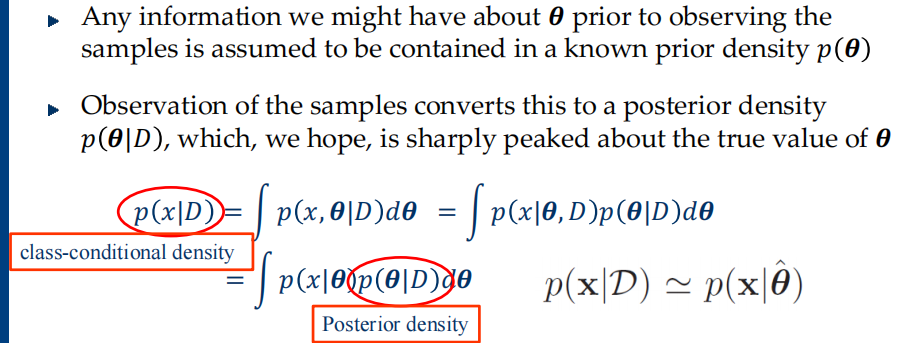
- The form of \(p(x|\theta)\) is assumed known, but the value of \(\theta\) is not known exactly
- Our knowledge about \(\theta\) is assumed to be contained in a known prior density \(p(\theta)\)
- The rest of our knowledge about \(\theta\) is contained in a set D of n random variables \(x_1, x_2, \dots, x_n\) that follows \(p(x)\)
- Compute the posterior \(p(\theta|D)\) , then estimate the class conditional density \(p(x|D)\)
-
朴素贝叶斯分类器:假设所有属性相互独立
- 优点
- 对离群的噪声点鲁棒
- 对缺失值,直接忽略
- 对无关属性鲁棒
- 缺点
- 假设在现实中很难成立
- 需要拉普拉斯平滑
- 优点
-
How to estimate probabilities from data? For continuous attributes
- discretize the range into bins: one ordinal attribute per bin
- two-way split: choose only one of the two splits as new attribute
- probability density estimation: 假设属性服从正态分布,用数据估计参数,再用参数估计概率
-
Laplace Smoothing 避免出现零概率使得相乘后为0
\[ \begin{aligned} P(x_{i}|\omega_{k})&=\frac{|x_{ik}|+1}{N_{\omega_{k}}+K}\newline P(x_{i}|\omega_{k})&=\frac{|x_{ik}|+\alpha}{N_{\omega_{k}}+\alpha K} \end{aligned} \]