7 MARL with Factored Value Functions¶
博弈论概念¶
- 回报payoff, utility \(u=(u_1,u_2,\dots,u_n)\rightarrow\mathbb{R}\)
- \(u_1: A_1\times A_2\rightarrow\mathbb{R}\)
- 回报矩阵
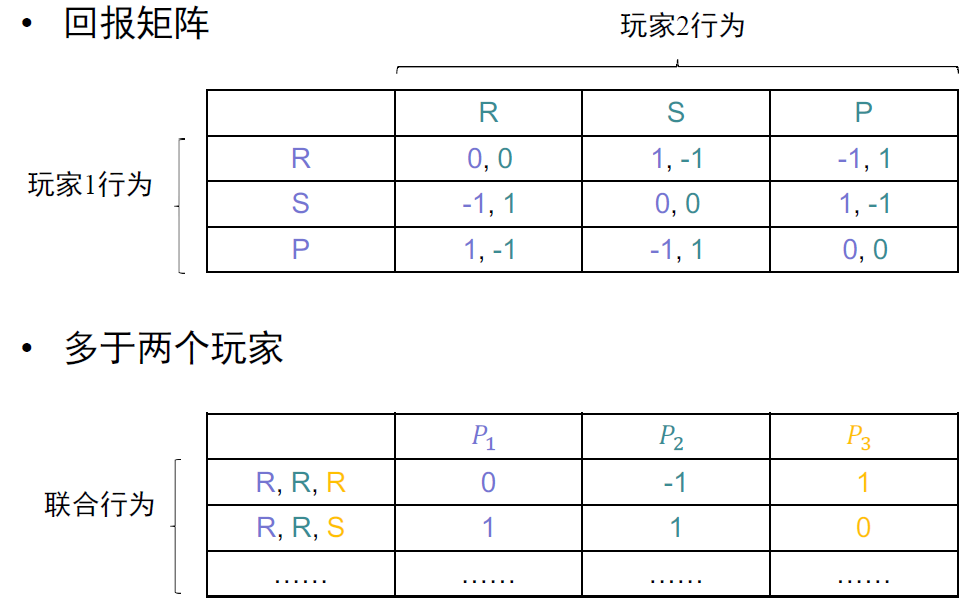
-
共识:A和B同时被告知游戏规则
-
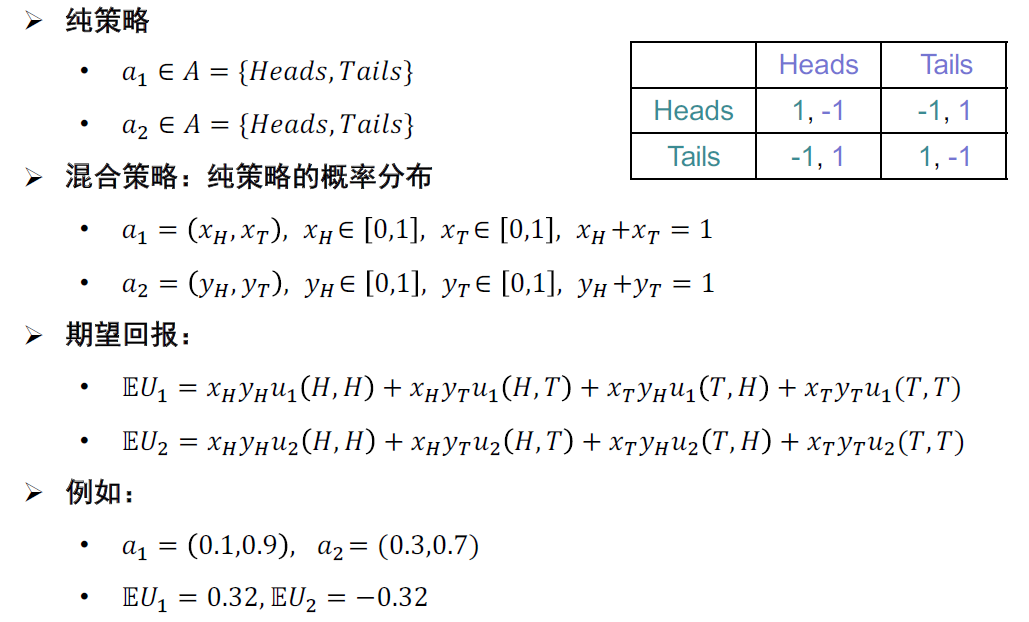
纯策略与混合策略
- 最佳策略博弈
- 给定\(a_{-i}\in A_1\times A_2\times\cdots\times A_{i-1}\times A_{i+1}\times\cdots\times A_n\)
- 如果\(\forall a_i'\in A_i,u_i(a_i,a_{-i})\geq u_i(a_i',a_{-i})\),则\(a_i\)是针对\(a_{-i}\)的最佳策略
- 占优策略(dominant strategy)
- 给定\(\forall a_{-i},a_i\)都是最佳策略博弈,则为占优策略
- 纳什均衡/混合策略纳什均衡:联合策略为纳什均衡解,当且仅当对每个玩家,策略\(a_i\)都是最佳博弈
多智能体信用分配¶
- MA-MDP模型假设:每个智能体都可以获取全局状态
-
Dec-POMDP:智能体无法获得全局状态,只能看到全局状态的投影
- 观测:\(o_i\in\Omega\)
- 观测函数:\(o_i\in\Omega\sim O(s,i)\)
- 智能体i的分布式策略:\(\pi_i(\tau_i):T\rightarrow A\)
- 行为观测历史:\(\tau_i\in T=(\Omega\times A)^*\)
- 集中训练分布式执行(CTDE)
- 训练过程可以获取全局状态
- 测试过程只能看到局部观测
-
MARL挑战
- 可扩展性:维度诅咒
- 多智能体信用分配:每个智能体对整体博弈的贡献
- 样本利用率:需要大量的交互数据
- 受限的观测:受限传感器,无法获取全局信息
- 探索:指数级别的联合策略空间
MARL范例
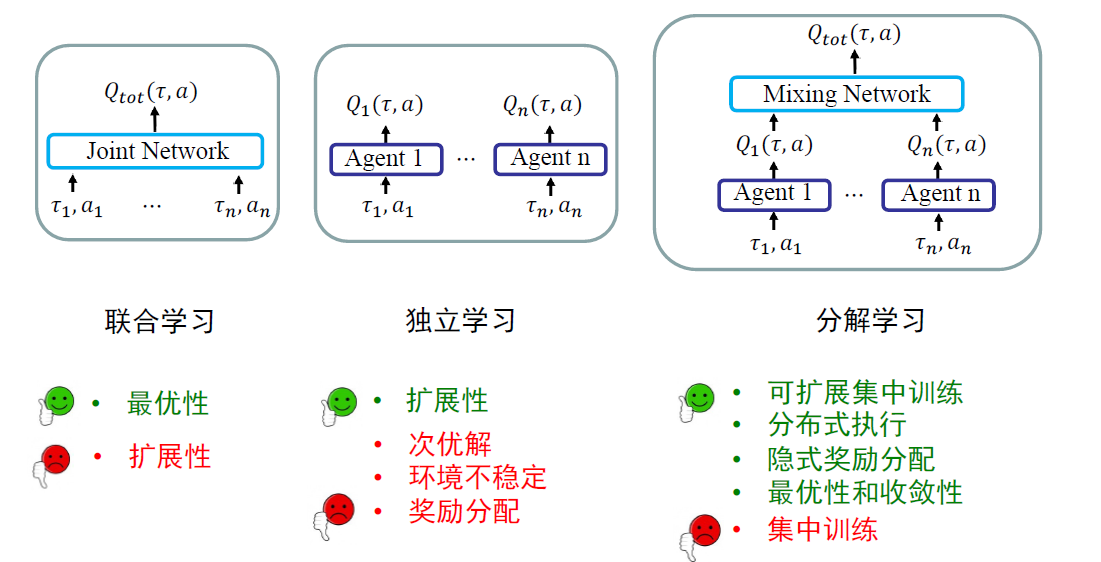
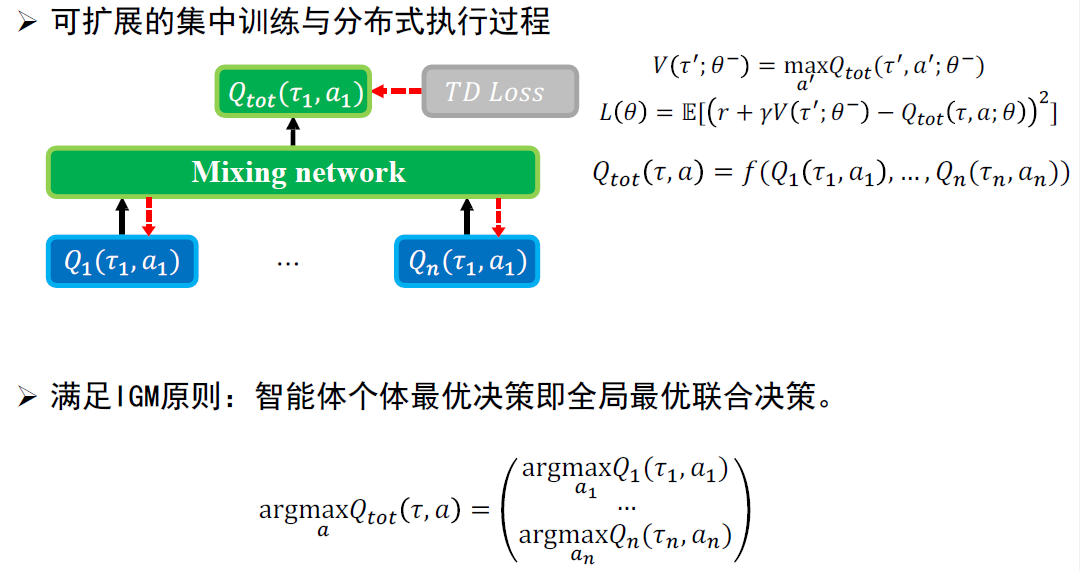
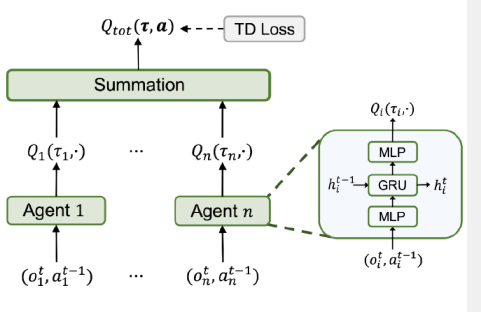
- 线性值分解:即\(Q_{tot}(\tau,a)=\sum_iQ_i(\tau_i,a_i)\), VDN算法
- 满足IGM
- 混合网络无参数,Q直接相加
- 对每个智能体没有直接的独特的奖励分配
- 在神经网络梯度回传时完成隐式奖励分配
- 理论保证,参考Multi-Agent Fitted Q-Iteration框架
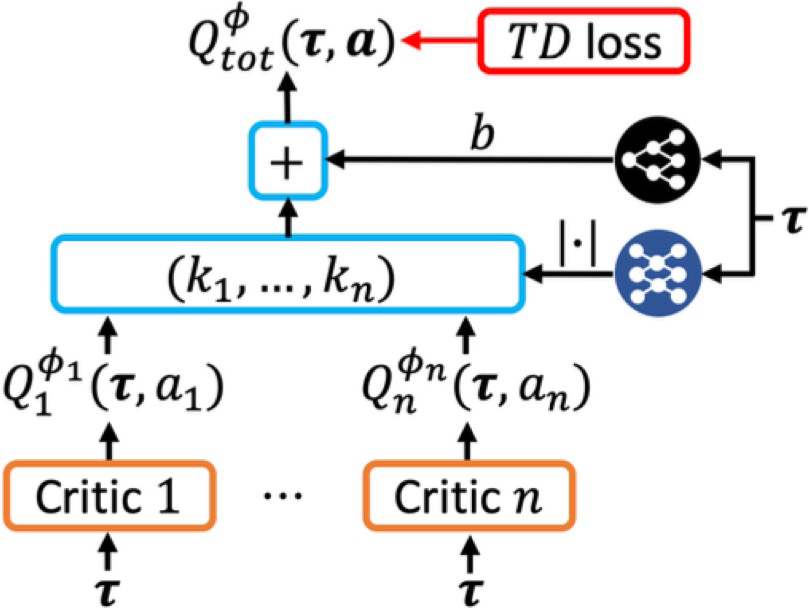
- DOP算法:引入线性可分解的critic网络,即\(Q_{tot}^\pi(\tau,.)=\sum_ik_i(\tau)Q_i(\tau,.)+b(\tau)\),其中\(\tau\)为联合历史数据
- 简单实用
- 支持离线MARL,并能减小方差
- 在策略单调提升的前提下收敛有理论保证
- 适合离散和连续行为空间
-
线性分解局限性:有限的表征能力,没有全局收敛保证
-
QMIX:引入单调混合网络函数,即\(\dfrac{\partial Q_{tot}}{\partial Q_i}\geq0\)(baseline)
- 引入超网络,使得混合网络的网络参数被限定为非负。即每个智能体至少对群体的贡献为正
-
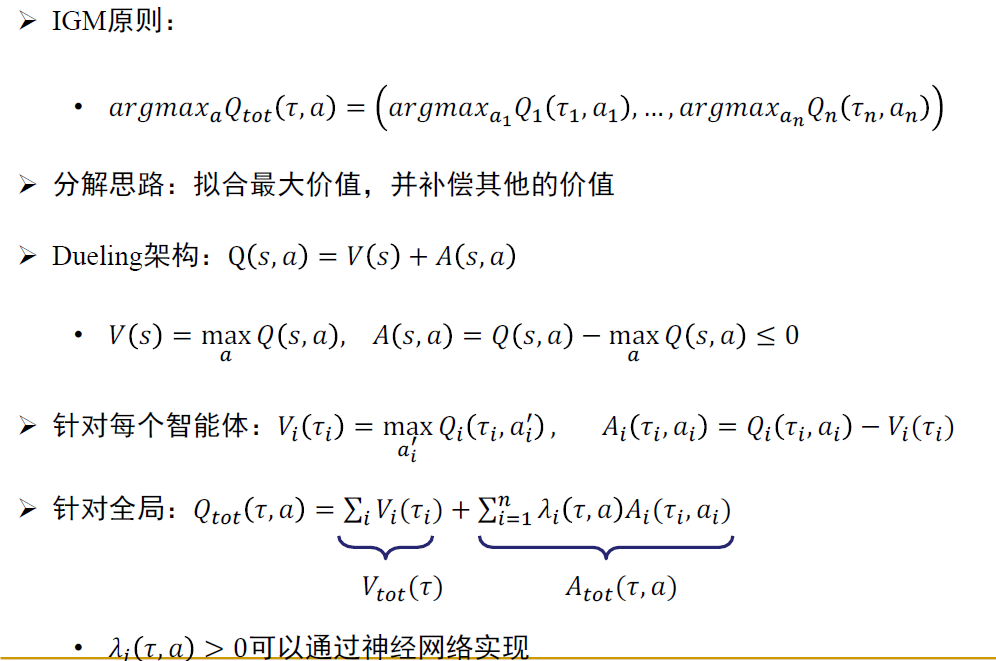
QPLEX:Q-Learning with IGM Factorization
其他MARL方法¶
动态共享学习目标¶
- 多智能体强化学习需要更大的样本量,所以参数共享作为减少样本量的方法,对于多智能体强化学习非常重要。
- 在智能体学习中,智能体倾向于学习到均质行为策略,而实际上,不同的智能体在环境交互中往往需要异质性策略
- 因此动态目标学习可以使智能体根据其目标最大化个体差异
ROMA¶
- 相似角色的智能体分享相似的学习目标和分享相似的行为策略。
- 相似角色\(\leftrightarrow\)相似子任务\(\leftrightarrow\)相似行为策略
- 角色可以作为短期博弈轨迹的编码并嵌入到输入。
- 智能体以对应的角色作为条件进行策略学习。
- 智能体在不同的场景下动态更换其角色
价值分解局限性¶
- 不确定性
- 价值分解可以导致合作失调;
- 在分布式执行的过程中也会导致行为浪费;
- 因此可以引入智能体之间的交流
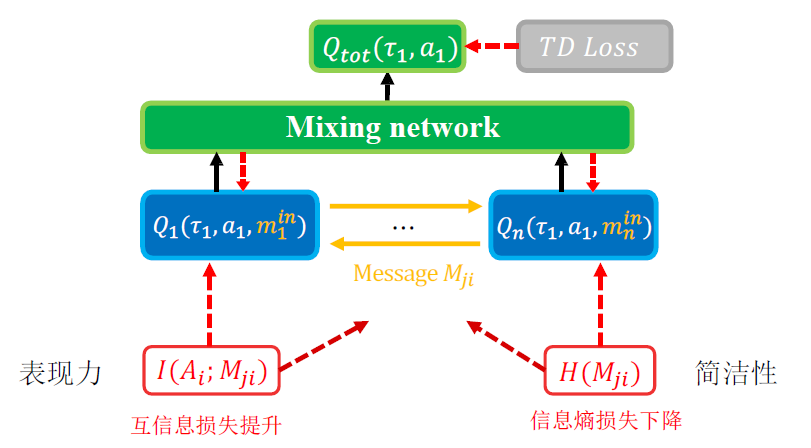
NDQ Nearly Decomposable Q-Value Learning¶
- 允许智能体间交流,但是需要最小化交流信道
- 智能体学习什么时候、向谁、交流什么内容
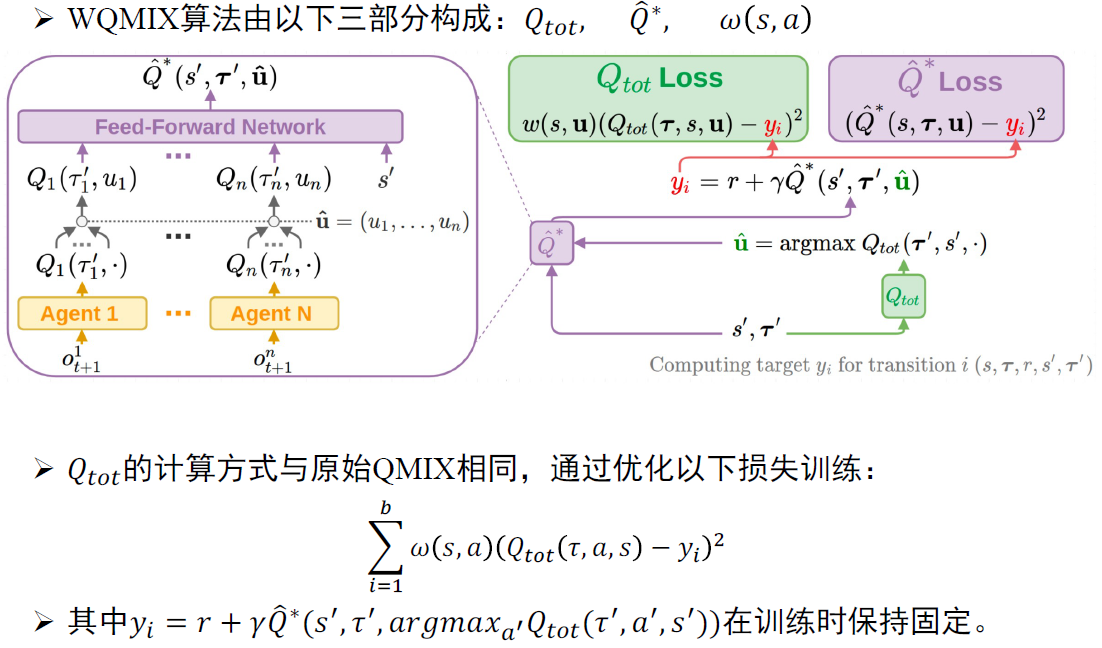
W-QMIX¶
- QMIX问题
- QMIX算法的单调性约束是充分不必要条件,即有些场景的值函数是QMIX无法精确拟合的。例如一个智能体的行为取决于另一个同队智能体时,QMIX是没有考虑的,同时IGM原则也被违反了。
- \(\mathcal{J}^*_{Qmix}\)算子不是收缩映射,即QMIX算法找不到\(\mathcal{J}^*\)对应的不动点,而只能找到其最接近不动点的次优点,所以QMIX的优化结果可能不是唯一的。
- QMIX可能会低估某些联合动作的价值。这是QMIX自身缺陷导致的,与计算性能、探索机制、及网络参数没有关系
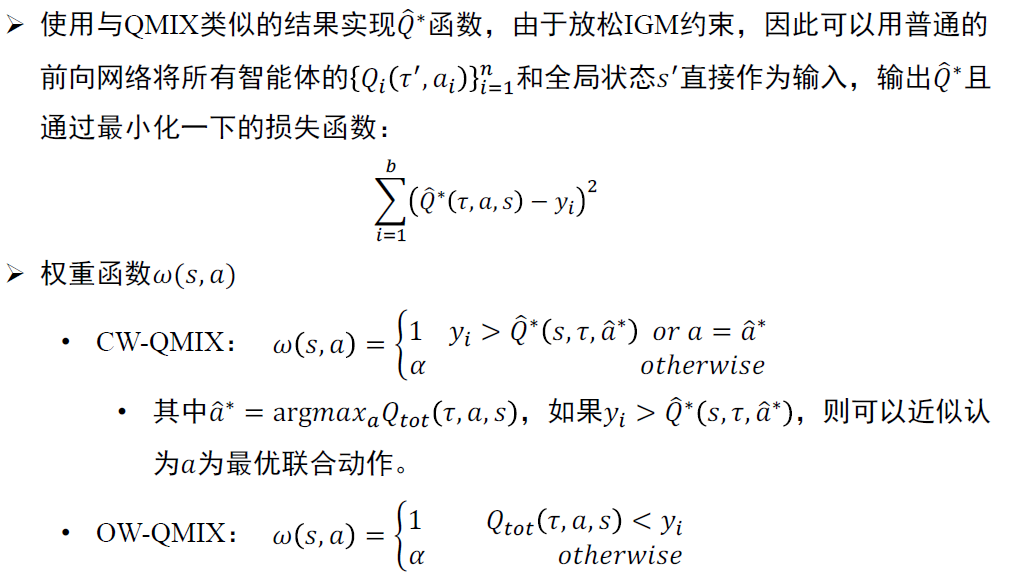
- 优化:增加权重函数 \(\pi_\omega Q=\arg\min\limits_{q\in Q^{mix}}\sum\limits_{a\in A}\omega(s,a)(Q(s,a)-y)^2\)
- \(\omega(s,a)=1\),即QMIX