Lec 6¶
6.1 策略学习高级技巧¶
From 《深度强化学习》第 9 章
TRPO¶
置信域策略优化 Trust Region Policy Optimization
- 优势:表现更稳定,对学习率不敏感;需要经验更少
置信域¶
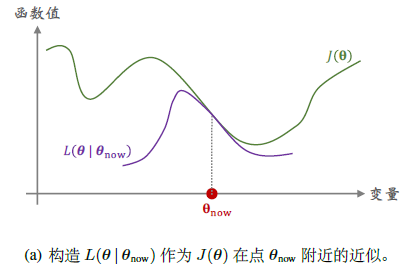
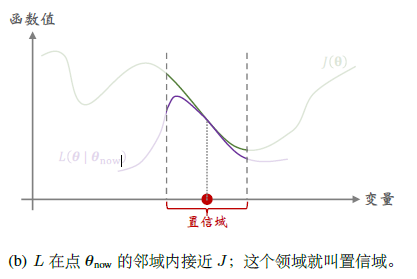
构造函数\(L(\theta|\theta_{now})\),满足对\(\forall\theta\in\mathcal{N}(\theta_{now})\),此函数很接近目标函数\(J(\theta)\),其中\(\mathcal{N}(\theta_{now})\)为邻域。此时我们称此邻域为置信域,即在此范围我们可以信任\(L(\theta|\theta_{now})\),用他代替目标函数
- 置信域方法:
- 第一步:做近似,给定\(\theta_{now}\),构造函数\(L\),满足如上定义。比如蒙特卡洛、二阶泰勒
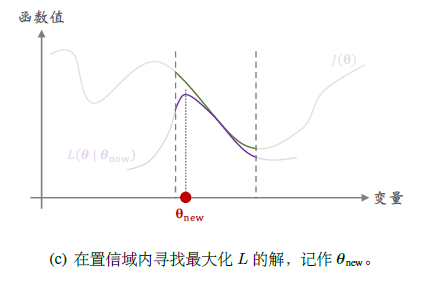
- 第二步:最大化,在置信域内寻找使得\(L\)最大的\(\theta\),即\(\theta_{new}=\arg\max\limits_{\theta\in\mathcal{N}(\theta_{now})}L(\theta|\theta_{now})\),需要解一个带约束的最大化问题,利用梯度投影算法、拉格朗日法等
Example
策略学习¶
状态价值的等价形式
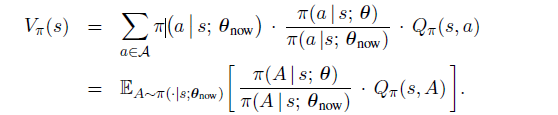
目标函数的等价形式
TRPO 训练流程¶
-
近似:
- 当前策略网络参数\(\theta_{now}\),用策略网络\(\pi(a|s;\theta_{now})\)控制智能体与环境交互,记录轨迹:
$$ s_1, a_1, r_1, s_2, a_2, r_2, \cdots, s_n, a_n, r_n $$
- 对于所有\(t=1,2,\cdots,n\),计算折扣回报\(u_t=\sum_{k=t}^n\gamma^{k-t}\cdot r_k\)
- 得出近似函数
$$ \tilde{L}(\theta|\theta_{now})=\dfrac{1}{n}\sum_{t=1}^n\dfrac{\pi(a_t|s_t;\theta)}{\pi(a_t|s_t;\theta_{now})}\cdot u_t $$
-
最大化:约束条件可以是二范数距离、KL 散度等
-
有两个需要调的超参,一是置信域半径\(\Delta\),另一个是求解最大化问题的学习率
熵正则¶
我们希望策略网络输出的概率分布的熵不要太小
只依赖于状态 s 与策略网络参数\(\theta\)
我们可以得到需要求解的最大化函数,其中\(\lambda\)为超参
这里使用策略梯度求解
6.2 连续控制¶
From 《深度强化学习》第 10 章
确定策略梯度¶
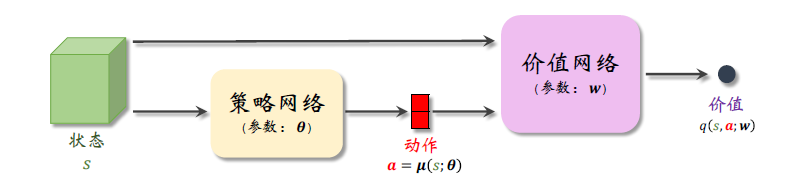
确定策略梯度(Deterministic Policy Gradient, DPG),策略网络输出为 d 维的向量 a。对于确定的状态 s,策略网络\(\mu\)输出动作 a 是确定的,而非随机抽样。价值网络是对动作价值函数的近似,仅用来在训练的时候评价策略网络
算法推导¶
-
用行为策略收集经验:这里行为策略可以不同于目标策略,行为策略可以是任意的,可以使用过时的策略网络参数,而且可以往动作中加入噪声\(\epsilon\in\mathbb{R}^d\),如\(a=\mu(s;\theta_{old})+\epsilon\)。通过异策略的方式,把收集经验和训练神经网络分隔开,把收集到的经验存入 replay buffer。我们把智能体的轨迹整理成\((s_t,a_t,r_t,s_{t+1})\),训练策略网络时只用到\(s_t\),训练价值网络都要用到
-
训练策略网络:改进参数\(\theta\),使得价值网络打分\(\hat{q}\)更大
-
目标函数: \(J(\theta)=\mathbb{E}_S[q(S,\mu(S;\theta);w)]\)
- 梯度上升: \(g_j\triangleq \nabla_{\theta }q(s_j,\mu(s_j;\theta);w)\),是\(\nabla_\theta J(\theta)\)的无偏估计
- 利用链式法则: 其中\(\hat{a}_j=\mu(s_j;\theta)\)
$$ \nabla_{\theta }q(s_j,\mu(s_j;\theta);w)=\nabla_\theta\mu(s_j;\theta)\cdot\nabla_aq(s_j,\hat{a}_j;w) $$
- 因此我们如下更新\(\theta\)
$$ \theta\leftarrow\theta+\beta\cdot\nabla_\theta\mu(s_j;\theta)\cdot\nabla_aq(s_j,\hat{a}_j;w) $$
-
训练价值网络:让价值网络 q 的预测越来越接近真实价值函数,利用实际观测的奖励\(r\)来校正
-
首先让价值网络预测\(\hat{q}_j,\hat{q}_{j+1}\),TD 目标\(\hat{y}_j=r_j+\gamma\cdot\hat{q}_{j+1}\),定义损失函数,计算梯度,梯度下降更新
-
训练流程:每次从经验回放数组中抽取一个四元组,进行策略网络预测、价值网络预测、计算 TD 目标和 TD 误差、更新价值网络、更新策略网络
高估问题¶
- TD 目标是对真实动作价值的高估
- 自举导致高估的传播
双延时确定策略梯度(TD3)¶
只改进 DPG 的算法而不改变结构。使用截断双 Q 和两个改进
解决高估问题¶
- 使用目标网络计算 TD 目标\(\hat{y}_j\),有所缓解但高估仍然很严重
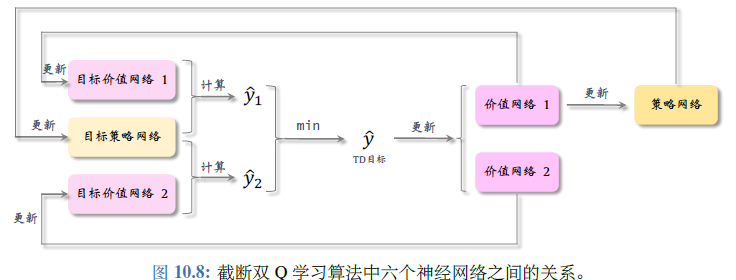
- 更好的方案:截断双 Q 学习(clipped double Q-learning):使用两个价值网络和一个策略网络,三个神经网络各对应一个目标网络,用目标策略网络计算动作,两个目标价值网络分别计算\(\hat{y}_j\),用较小的作为 TD 目标
- 进一步改进:
- 往动作中加噪声,即在用目标策略网络计算动作时,改成\(\overline{\hat{a}_{j+1}}=\mu(s_{j+1};\theta^-)+\xi\),其中\(\xi\)为随机向量,每个元素独立随机从截断正态分布中抽取。这里记截断正态分布为\(\mathcal{CN}(0,\sigma^2,-c,c)\),变量落在\([-c,c]\)之外的概率为 0,这样可以防止噪声过大
- 减小更新策略目标和策略网络的频率:每隔 k 轮更新一次策略网络和三个目标网络。k 为超参
训练流程¶
每次从数组中随机抽取一个四元组,让目标策略网络预测、两个目标价值网络预测、计算 TD 目标、让两个价值网络做预测、计算 TD 误差、更新价值网络、每隔 k 轮更新策略网络和三个目标网络
随机高斯策略¶
策略梯度训练流程¶
-
搭建均值网络\(\mu(s;\theta)\),方差对数网络\(\rho(s;\theta)\),辅助网络\(f(s,a;\theta)\)
-
让智能体与环境交互,计算每一步的状态、动作、奖励,并对参数\(\theta\)更新
-
观测当前状态 s,计算均值、方差对数、方差;此处指数函数应用到向量的每一个元素
\[ \hat{\mu}=\mu(s;\theta), \hat{\rho}=\rho(s;\theta), \hat{\sigma}^2=\exp(\hat{\rho}) \] -
设\(\hat{\mu}_i\)和\(\hat{\sigma}_i\)分别是第 i 个元素,从正态分布中采样\(a_i\sim\mathcal{N}(\hat{\mu}_i,\hat{\sigma}_i^2)\),得到动作\(\mathcal{a}=[a_1,a_2,\cdots,a_d]\)
-
近似计算动作价值 \(\hat{q}\approx Q_\pi(s,a)\)
-
用反向传播计算出辅助网络关于参数\(\theta\)的梯度 \(\nabla_\theta f(s,a;\theta)\)
-
用策略梯度上升更新参数 \(\theta\leftarrow\theta+\beta\cdot\hat{q}\cdot\nabla_\theta f(s,a;\theta)\)
REINFORCE¶
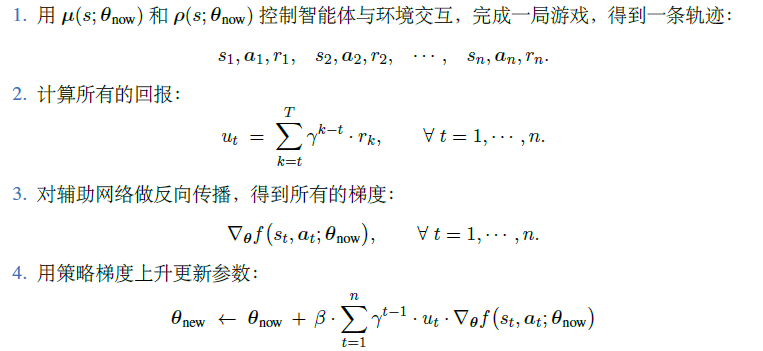
用实际观测的折扣回报\(u_t=\sum_{k=t}^n\gamma^{k-t}r_k\)代替动作价值,可以将策略梯度近似成\(g\approx u_t\nabla_\theta f(s,a;\theta)\),重复一以下步骤直到收敛:
效果不如使用基线的 REINFORCE
用 AC 学习参数¶
略