4 Deep Q Network¶
探索与利用¶
\(\epsilon\)-greedy¶
\(\epsilon\)可以设定为超参,也可以随训练进行衰减
UCB¶
-
\(Q(a)\leq\hat{Q}_t(a)+\hat{U}_t(a)\),其中上界函数\(\hat{U}_t(a)\)与\(N_t(a)\)相关,大行为访问次数导致较小的置信上界
-
Hoeffding不等式: $$ \mathbb{P}[Q(a)>\hat{Q}_t(a)+U_t(a)]\leq e^{-2tU_t(a)^2} $$
-
我们令\(p=e^{-2tU_t(a)^2}\),则\(U_t(a)=\sqrt{\dfrac{-\log p}{2N_t(a)}}\)
-
一种启发方法是及时降低p的阈值,设定\(p=t^{-4}\),则\(U_t(a)=\sqrt{\dfrac{2\log t}{N_t(a)}}\)
-
因此就有 $$ a_t^{UCB1}=\arg\max_{a\in A}(Q(a)+\sqrt{\dfrac{2\log t}{N_t(a)}}) $$
-
更一般地,\(U_t(a)=\sqrt{\dfrac{c\log t}{N_t(a)}}\)
-
蒙特卡洛树搜索¶
- 核心思路:不需要手动设计一个关于状态的启发函数,而是从该状态开始随机模拟一局博弈获得胜负信息。
- 增加UCB计算可以给状态更好的预估价值。
- MCTS迭代:选择、扩展、模拟、回传
- 选择过程:递归选择最大UCB值的子节点
- 扩展过程:为子节点扩充未访问的节点并加进蒙特卡洛树中
- 模拟过程:从新扩展的节点开始,采用固定的策略进行博弈模拟(rollout),直到博弈结束。
- rollout过程采用任何策略皆可
- 回传过程:将模拟的结果递归回传到路径经过的所有节点直到根节点。
- 一般更新节点价值和节点访问次数
- 如果预存节点UCB值,则更新该路径上所有节点的子节点的UCB值
- 优势
- 在无专家知识的时候很有效;
- 节点大量模拟后可以逼近真实节点价值;
- MCTS过程可以并行化,例如可以在扩展的节点上进行多进程并行模拟;
- 劣势
- MCTS的计算结果有较大的方差;
- 模拟过程的策略对搜索效率有较大影响;
深度Q网络¶
将表格式的\(Q(s,a)\)的取值用神经网络代替,且该网络以状态+行为作为输入,以该状态行为价值作为输出,那么Q-learning算法就可以直接扩展为深度Q学习。
-
以学习目标 $r + \gamma \max\limits_{a' \in \mathcal{A}} Q(s', a') $ 来增量式更新\((s, a)\),即令 \(Q(s, a)\)贴近其 TD 目标。
-
状态价值网络: \(Q_\omega(s, a)\)
-
时序差分目标结果:\(r + \gamma \max\limits_{a'} Q_\omega(s', a')\)
给定一组状态转移数据: \(\{(s_i, a_i, r_i, s'_i)\}\),深度 Q 网络的损失函数构造成为均方误差形式:
$$ \omega^* = \arg\min_\omega \frac{1}{2N} \sum_{i=1}^N \left[ Q_\omega(s_i, a_i) - \left( r_i + \gamma \max_{a'} Q_\omega(s'_i, a') \right) \right]^2 $$
-
-
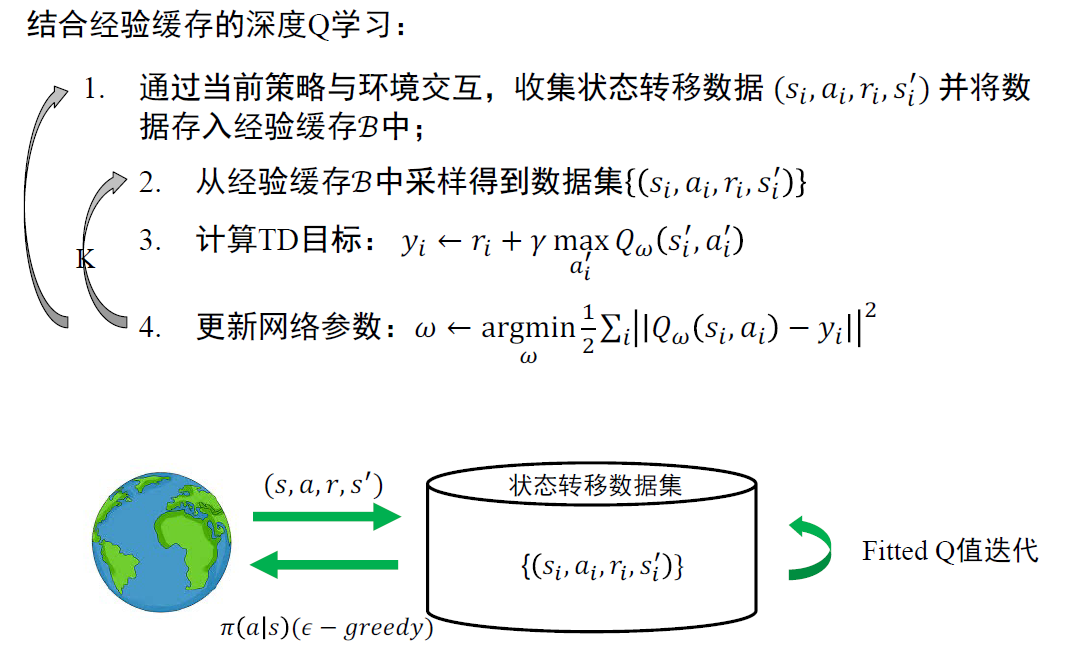
Fitted Q值迭代算法:
- 通过某些策略收集状态转移数据集 ${ (s_i, a_i, r_i, s_i') } $
- 计算TD目标:$y_i \leftarrow r_i + \gamma\max\limits_{a_i'} Q_{\alpha}(s_i', a_i') $
- 更新网络参数:$ \omega \leftarrow \arg\min\limits_{\omega} \frac{1}{2} \sum_i||Q_\omega(s_i, a_i) - y_i||^2 $
-
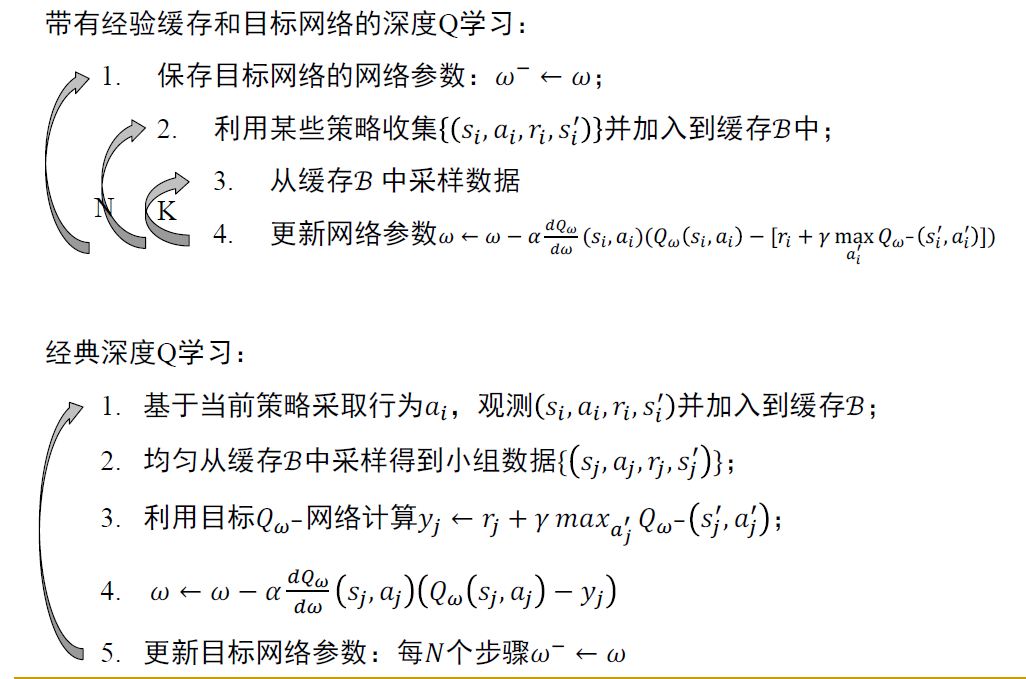
在线Q值迭代算法:
- 环境中根据策略采取行为\(a_i\),并从环境获取奖励\((s_i, a_i, r_i, s’_i)\)
- 计算TD目标:\(y_i \leftarrow r_i + \gamma \max\limits_{a’_i} Q_{\omega}(s’, a’)\)
- 更新网络参数:\(\omega \leftarrow \omega-\alpha \dfrac{dQ_\omega}{d\omega} (s_i, a_i)(Q_\omega(s_i, a_i) - y_i)\)
-
存在问题:
- 神经网络训练需要独立同分布数据,但是状态转移数据强相关;
- 更新神经网络参数并不是梯度下降,\(y_i\)的计算也更新梯度;
- Q值的更新不稳定
- 原因:对于同样的状态转移数据,短时间内同样的输入得到不同的TD目标作为监督信号
-
解决数据相关性:并行Q-learning,用其他进程的状态转移更新
经验回放缓存:不通过某些策略收集数据,而是从经验回放缓存中采样;经验回放缓存中数据来源于任何策略都可以
-
解决后两个问题:通过目标网络,TD目标阶段性保持不变且不参与梯度回传
-
经典深度Q学习
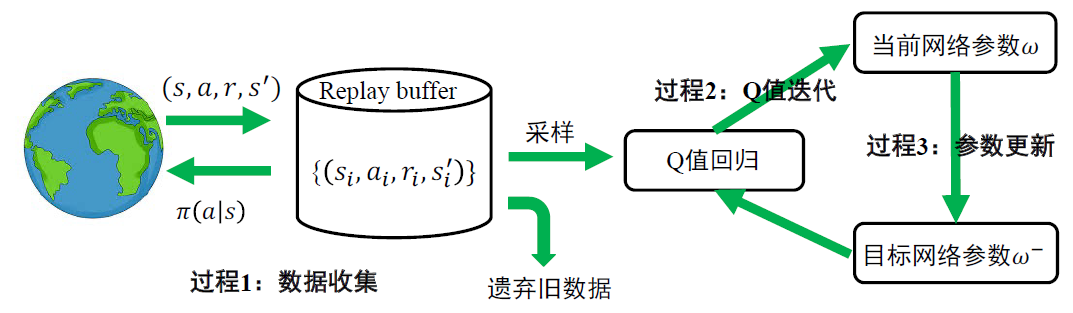
- 更新目标网络参数可以采用滑动平均的方法,即\(\omega^-\leftarrow\tau\omega^-+(1-\tau)\omega,\tau=0.99\)
- 这种方法在为新\(\omega^-\)赋值时可以保留旧有的\(\omega\)的影响
DQN改进算法¶
-
Q值过高估计
- 基于Boostrapping算法的价值估计的共有问题
- 原因:最大值的期望大于期望的最大值,算法总是选择价值最高的动作作为目标进行更新
-
Double DQN:选择动作和计算价值不使用同一个网络,使用两个网络分别进行目标值计算与动作选择,如果两个网络的误差不同,则可以在一定程度上解决问题
- Dueling DQN:将原来的Q网络拆分成两个部分:V网络和A网络
- V网络:以状态为输入、以实数为输出的表示状态价值的网络
- A网络:优势网络,它用于度量在某个状态𝑠下选取某个具体动作𝑎的合理性,它直接给出动作𝑎的性能与所有可能的动作的性能的均值的差值。如果该差值(优势)大于0,说明动作𝑎优于平均,是个合理的选择;如果差值(优势)小于0,说明动作𝑎次于平均,不是好的选择
- 一般来说:\(Q(s,a)=V(s)+A(s,a)\)
- 分辨当前的价值是由状态价值提供还是行为价值提供,进而有针对性的更新,增加样本利用率
- 优先经验回放池PER:一般来说,具有较大TD误差的样本应该给予更高的优先级
- 采样第\(t\)个样本的概率\(p_t\)正比于TD误差\(\delta_t\),即\(p_t\propto|\delta_t|+\epsilon\),其中\(\epsilon\)为小正数,防止采样概率为0
- 或反比于误差排位\(p_t\propto\dfrac{1}{rank(t)}\)
- 第二种更鲁棒
- 引入参数\(\beta\in[0,1]\)调整学习率 \(\alpha_t\leftarrow\alpha(np_t)^{-\beta}\)
- 均匀采样时,\(p_i=\dfrac{1}{n},(np_t)^{-\beta}=1\),学习率均为\(\alpha\),回归普通的经验回放池
- 基于优先采样时,具有高优先级的样本使用较低的学习率