2 Value Estimation¶
Monte-Carlo methods¶
基于随机采样和统计的方法
- 回顾 $$ V^{\pi}(s)=E[R(s_0)+\gamma R(s_1)+\gamma^2R(s_2)+\cdots|s_0=s,\pi] $$
$$ =E[G_t|s_0=s,\pi]\approx\dfrac{1}{N}\sum_{i=1}^{N}G_t^i $$
-
具体实现
- 对每一回合中时间t步时的状态s
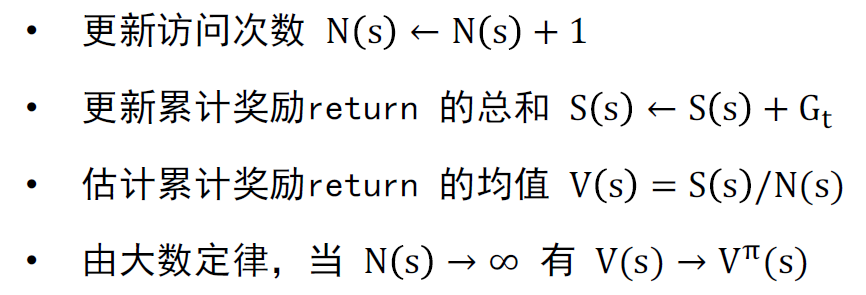
- 整理为增量更新:
$$ N(s_t)\leftarrow N(s_t)+1 $$
$$ V(s_t)\leftarrow V(s_t)+(G_t-V(s_t))/N(s_t) $$
- 对非平稳环境,即环境动态会随时间发生变化,蒙特卡洛方法可以跟踪一个滑动窗口内的平均值
$$ V(s_t)\leftarrow V(s_t)+\alpha(G_t-V(s_t)) $$
-
总结:
- 直接从经验回合进行学习,不需要模拟/搜索
- 模型无关(model-free),无需环境信息
- 核心思想简单直白:value = mean return
- 使用完整回合进行更新:只能应用于有限长度的马尔可夫决策过程,即所有的回合都应有终止状态
时序差分¶
-
基本特点和定义
- $$ G_t=R_{t+1}+\gamma R_{t+2}+\cdots+\gamma_{T-1}R_T=R_{t+1}+\gamma V(s_{t+1}) $$ 是 \(V^\pi\)的有偏估计
-
\[ V(s_t)\leftarrow V(s_t)+\alpha(R_{t+1}+\gamma V(s_{t+1})-V(s_t)) \]
- 能够直接使用经验回合学习,同样也是模型无关的,结合了自举(bootstrapping),能从不完整的回合中学习。通过更新当前预测值,使之接近估计出来的累计奖励,而非真实累计奖励,能够在每一步之后进行在线学习,能够应用于无限长度的马尔可夫决策过程
-
时序差分目标具有更低的方差,这是因为
- 累计奖励取决于多步随机动作、状态转移和奖励
- 时序差分取决于单步随机动作、状态转移和奖励
资格迹¶
-
多步时序差分方法 \(V(s_t)\leftarrow V(s_t)+\alpha(G_t^n-V(s_t))\)
-
资格迹通常使用一个超参数\(\lambda\in[0,1]\)控制,\(\lambda=1\)等价于蒙特卡罗,\(\lambda=0\)等价于时序差分
-
常见的:\(TD-\lambda, G_t^n=R_{t+1}+\gamma R_{t+2}+\cdots+\gamma^{n-1}R_{t+n}+\gamma^n V(s_{t+n})=(1-\lambda)\sum_{n=1}^\infty\lambda^{n-1}G_t^n\)
- 前向视角:朝着\(G_t^n\)方向更新值函数,同时通过观测未来数据计算,只能计算完整回合
- 后向视角:对每个状态s保持资格迹,更新每个状态s的价值函数,与TD-error和资格迹\(E_t(s)\)成比例关系
表格型时序差分方法¶
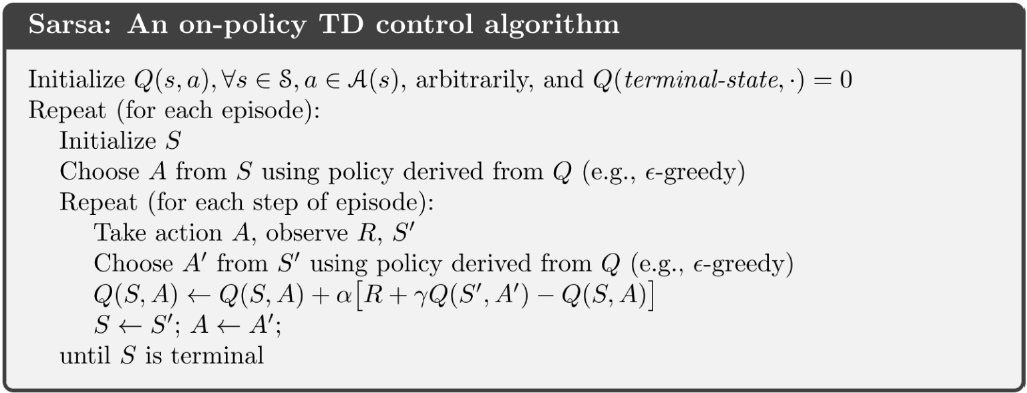
SARSA¶
- 策略评估:
-
策略改进:\(\epsilon\)-greedy
-
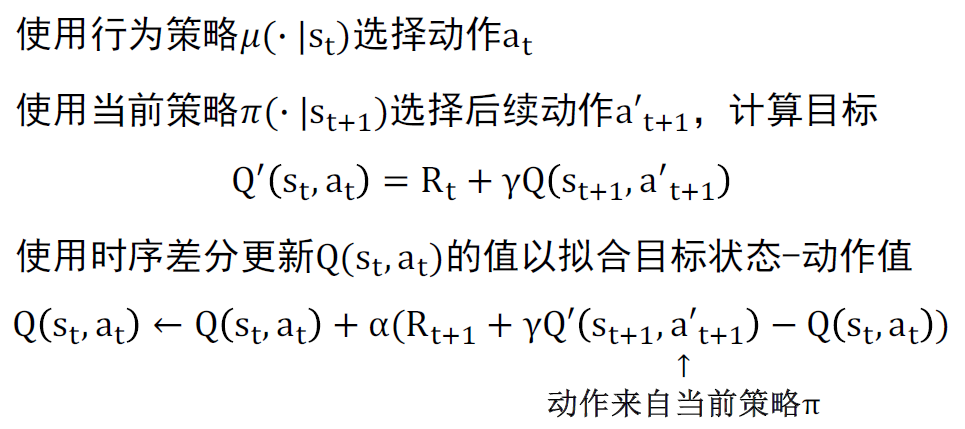
on-policy TD control使用当前策略进行动作采样,即SARSA算法中的两个动作A都是由当前策略选择的
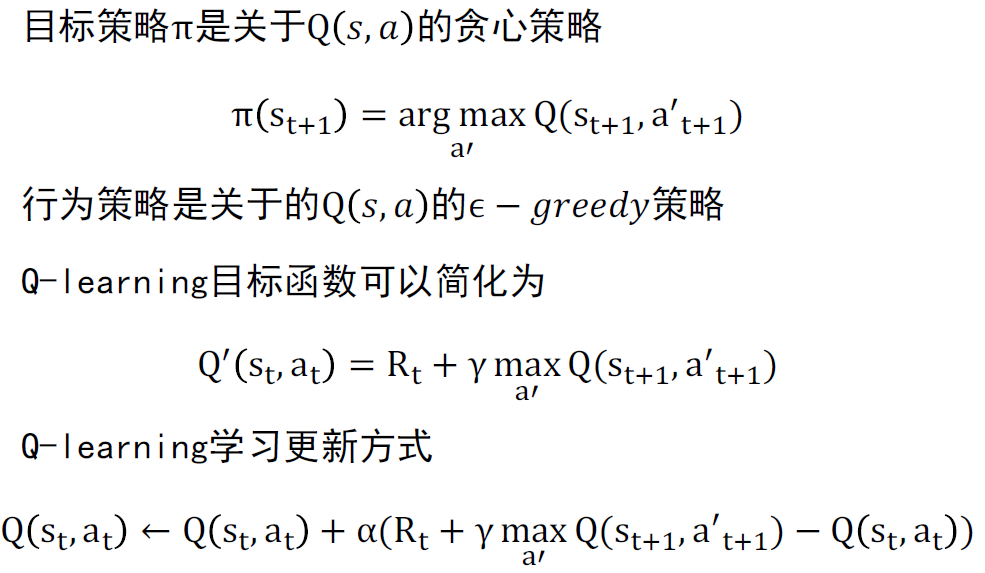
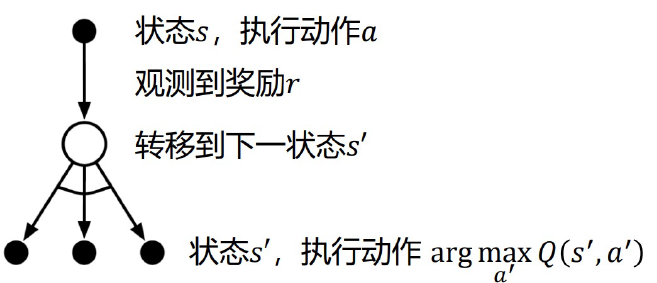
Q-learning¶
-
状态动作值函数\(Q(s,a)\in R\),一种离线策略(off-pilicy)方法 $$ Q(s_t,a_t)=\sum_{t=0}^T R(s_t,a_t),a_t \sim \mu(s_t) $$ 迭代式: $$ Q(s_t,a_t)=R(s_t,a_t)+\gamma Q(s_{t+1},a_{t+1}) $$
-
离线策略:
- 目标函数\(\pi(a_t|s_t)\)进行值函数评估
- 行为策略\(\mu(a_t|s_t)\)收集数据
- 离线:平衡探索和利用
-
具体实现:
- 定理:Q-learning可以收敛到最优状态-动作值函数 $$ Q(s_t,a_t)\rightarrow Q^*(s_t,a_t) $$
定理证明 by 收缩算子、无穷范数 (真看不进去)
定义H算子 $$ HQ(s_t,a_t)=R_t +\gamma E_{s_{t+1}\sim p(\cdot|s,a)}[\max_{a'}Q(s_{t+1},a_{t+1})] $$
最优值函数\(Q^*\)是\(H\)的不动点,意味着\(Q^*=HQ^*\)
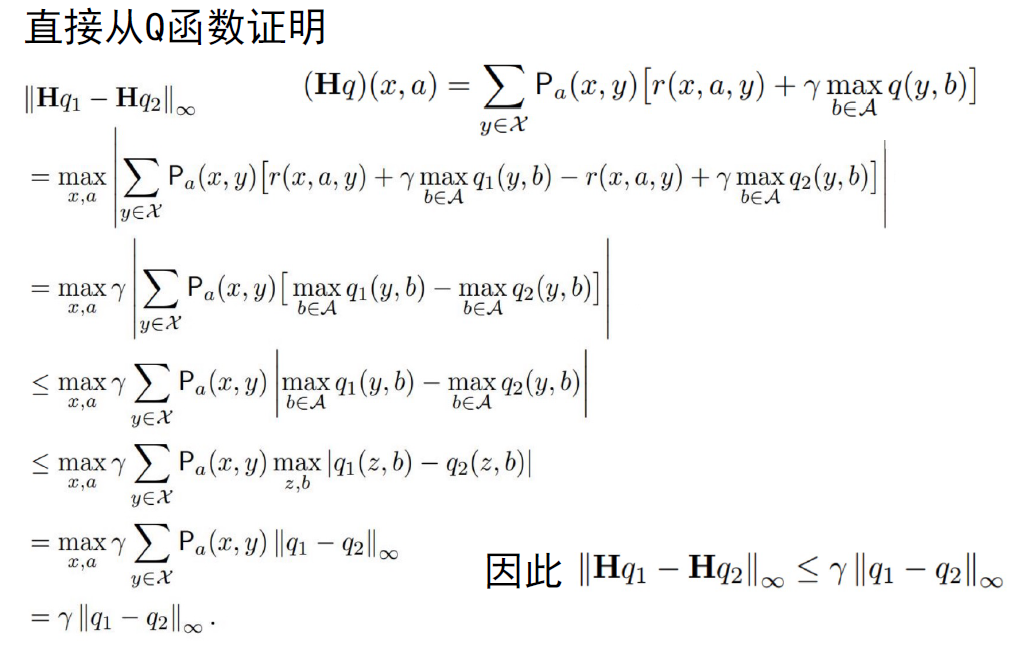
- 由数列收敛的柯西定理得证