Lec.07: Structure from Motion¶
Problems to be noticed
- 相机怎么把三维点映射到图像平面 by camera model
- 怎么计算相机在世界坐标系下的位置和旋转 camera calibration and pose estimation
- 从图片重建3D结构 structure from motion
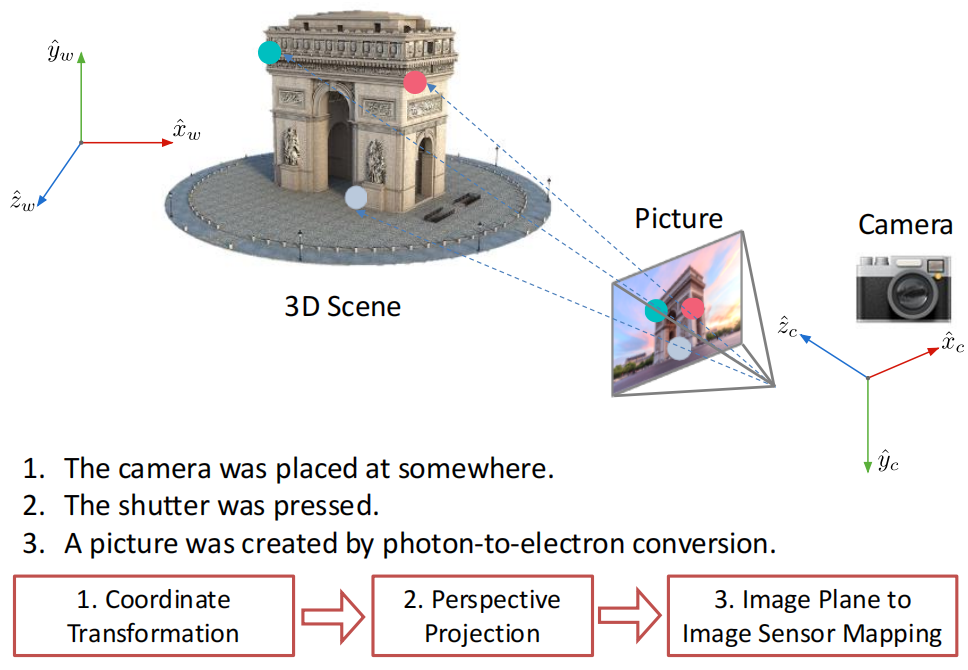
Camera model¶
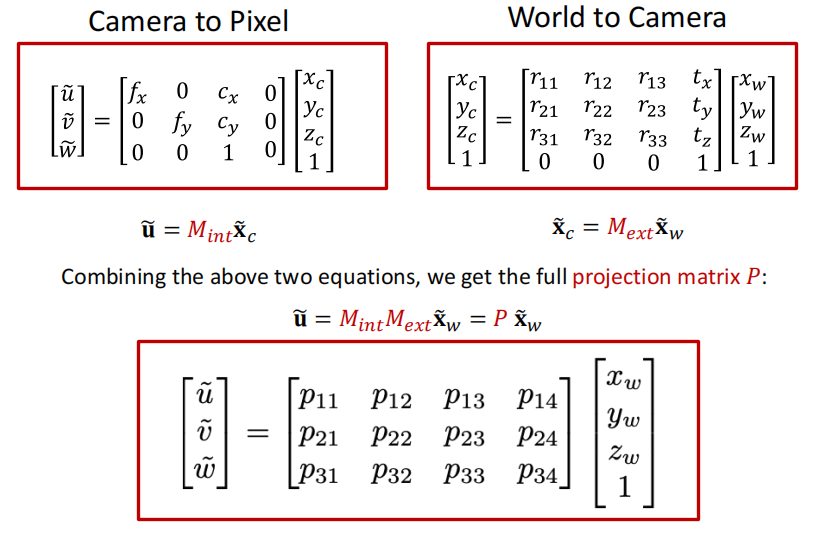
- Image Formation:世界坐标系->相机坐标系->像平面->像素坐标
-
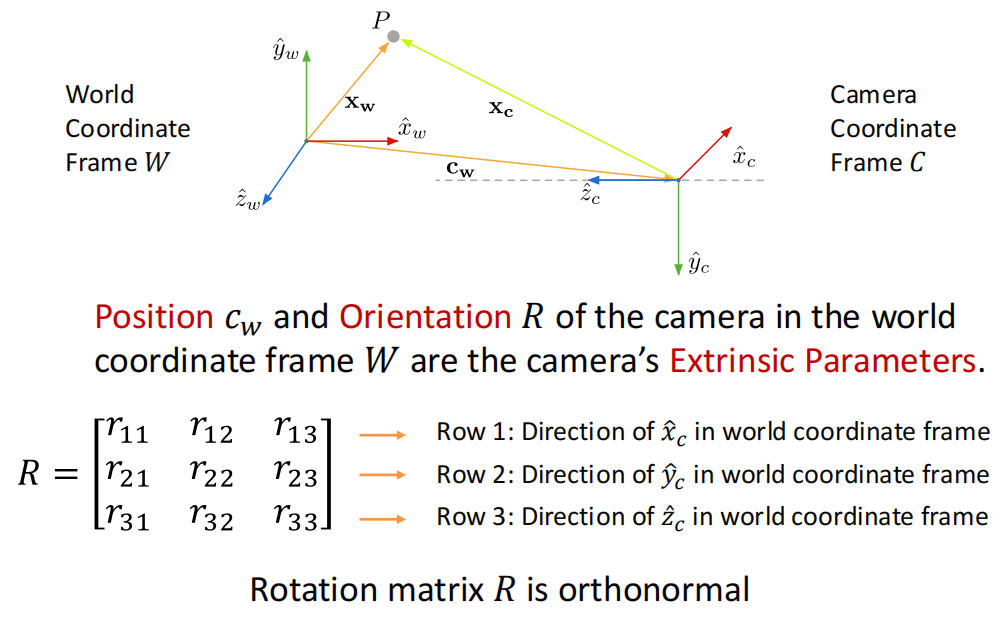
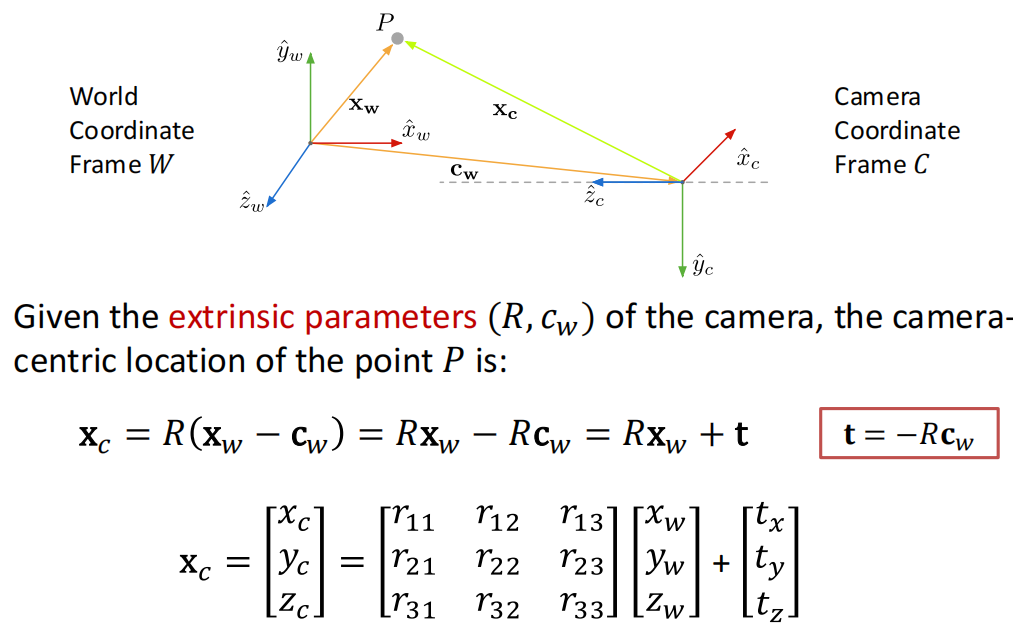
相机坐标系对齐到世界坐标系 extrinsic parameters包括相机坐标和旋转角度\((R,c_w)\),R是正交单位阵
- world-to-camera transformation
- 齐次坐标系下
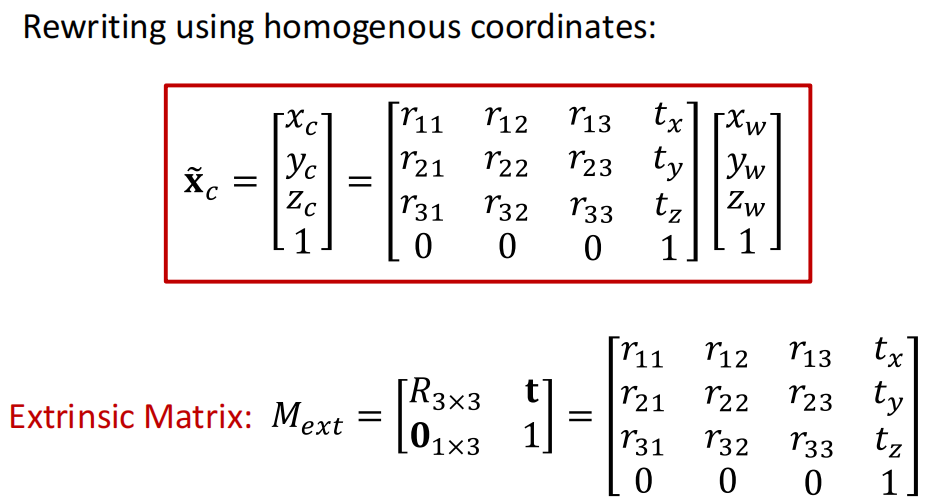
-
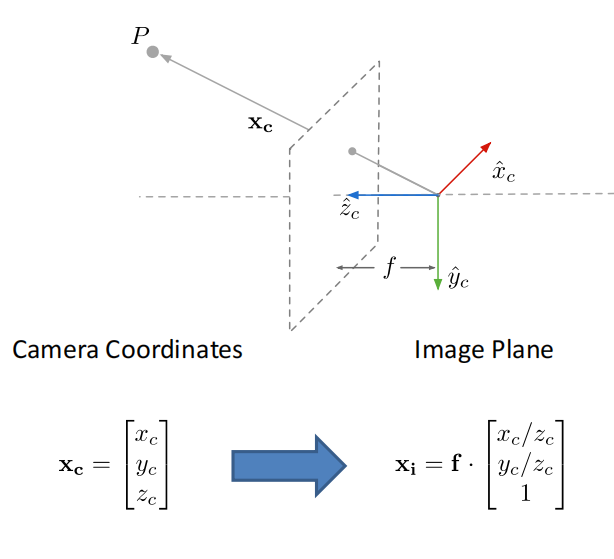
camera coordinate投影到image plane
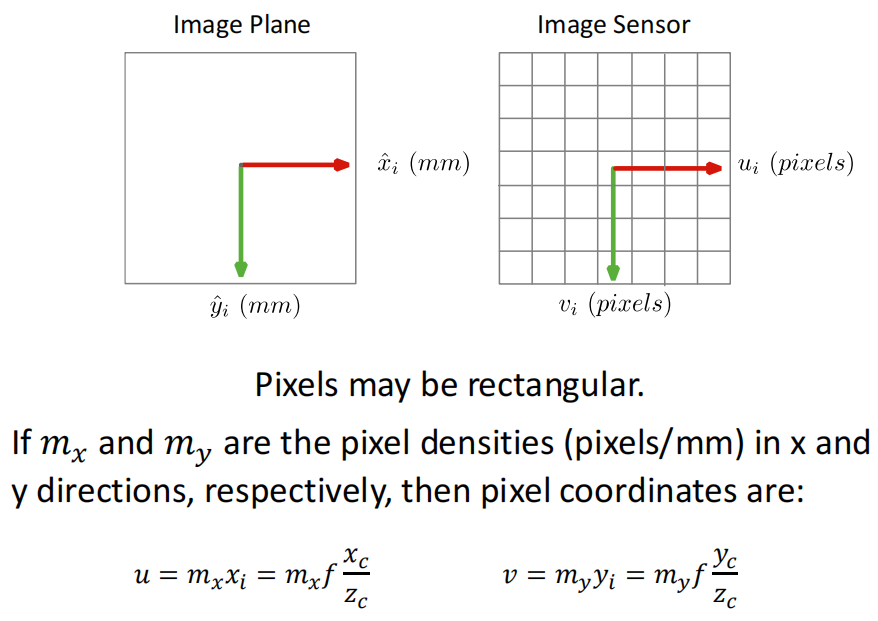
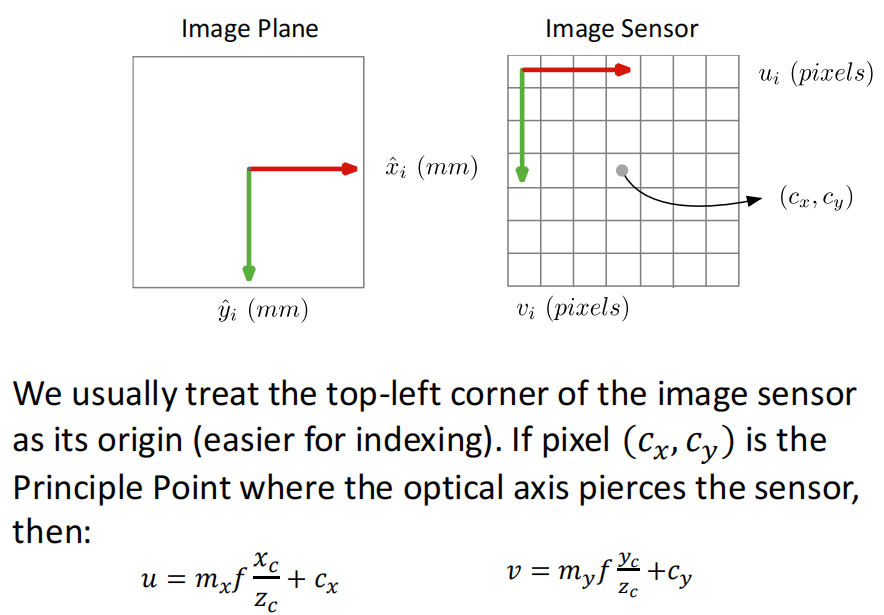
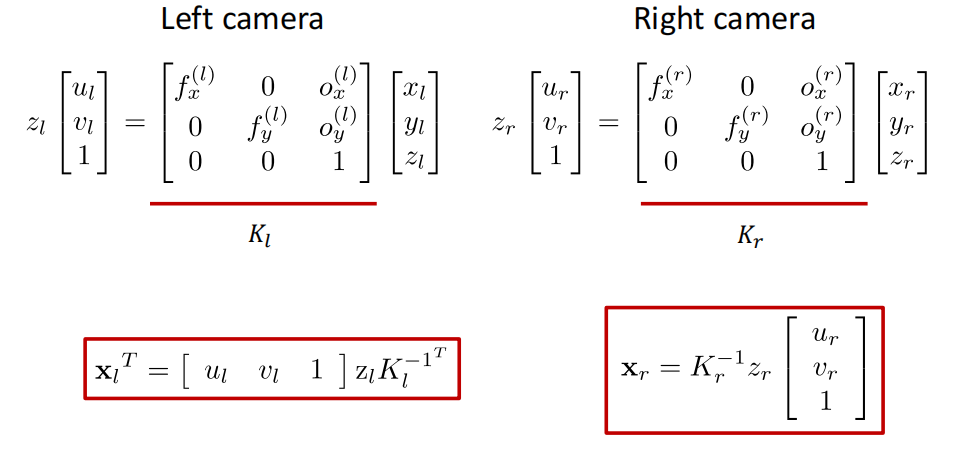
- image plane to image sensor mapping by intrinsic matrix
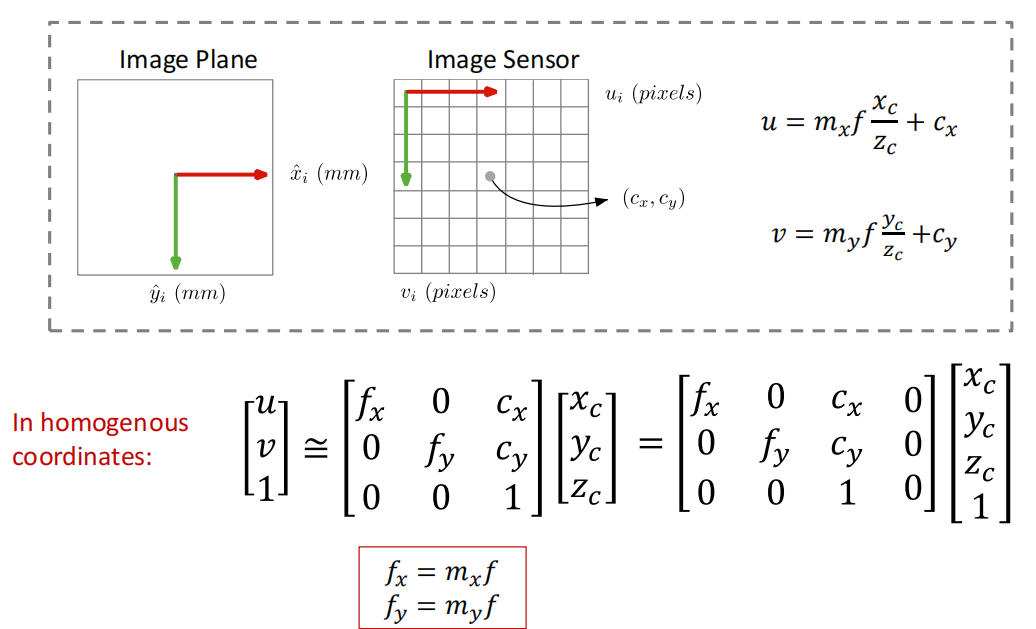
- 总的projection matrix \(P\)
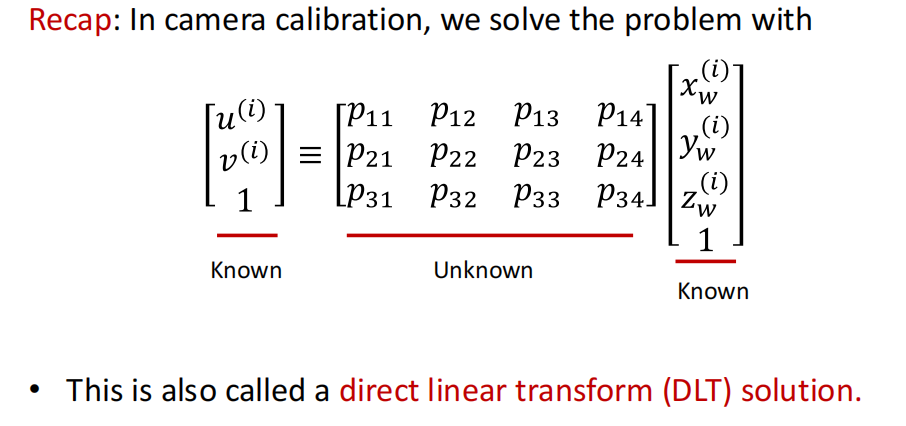
Camera calibration¶
-
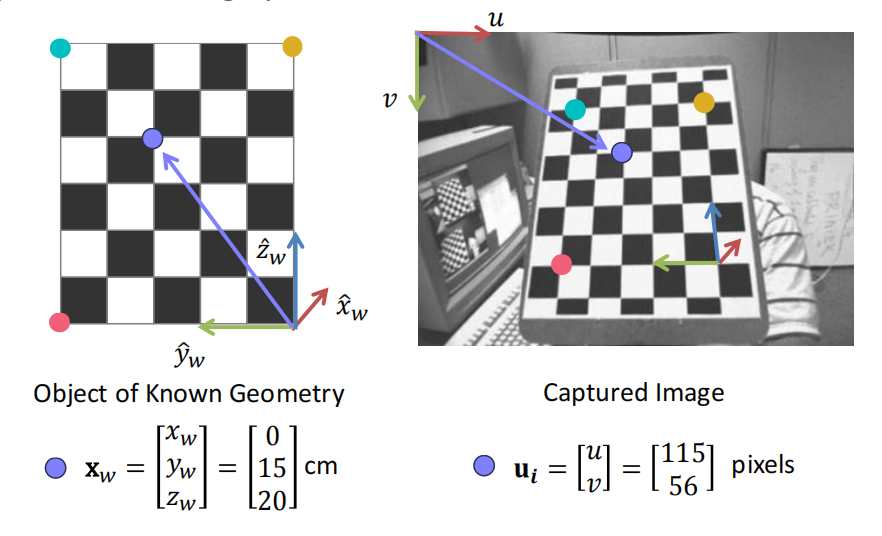
Step 1: Capture an image of an object with known geometry. 如使用标定板作为已知世界坐标系
-
Step 2: Identify correspondences between 3D scene points and image points.
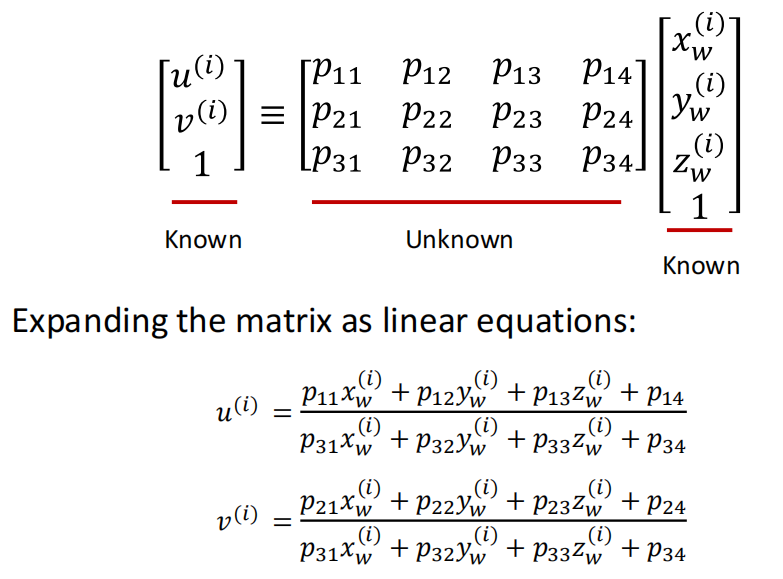
- Step 3: For each corresponding point \(i\) in scene and image:
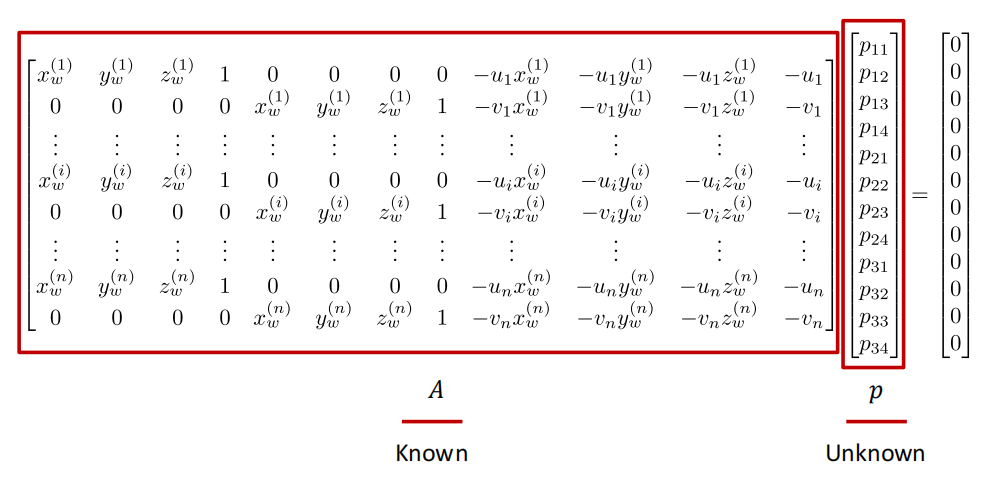
- Step 4: Rearranging the terms
-
Step 5: Solve for \(p\)
- 注意到对p的所有数同时乘除一个非零数不会影响结果
- P is defined only up to a scale.
- 因此我们通常定义最后一个分量为1或者p的模长为1
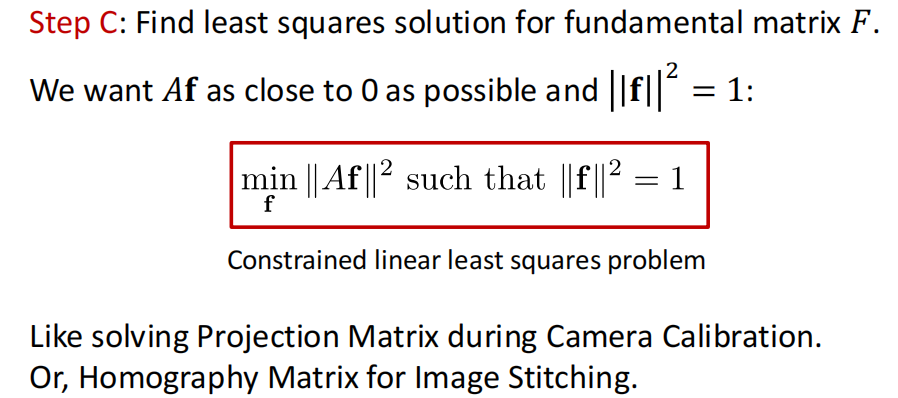
- 我们让 \(Ap\) 尽可能为0,即\(\min\limits_{p}||Ap||^2\)同时使得 \(||p||^2=1\)
- 可以知道解是矩阵\(A^TA\)最小特征值对应的特征向量
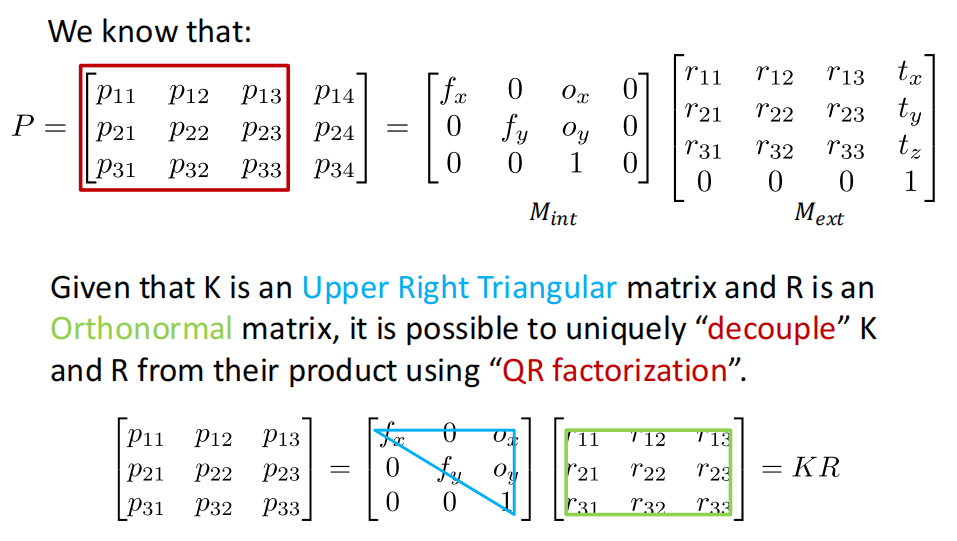
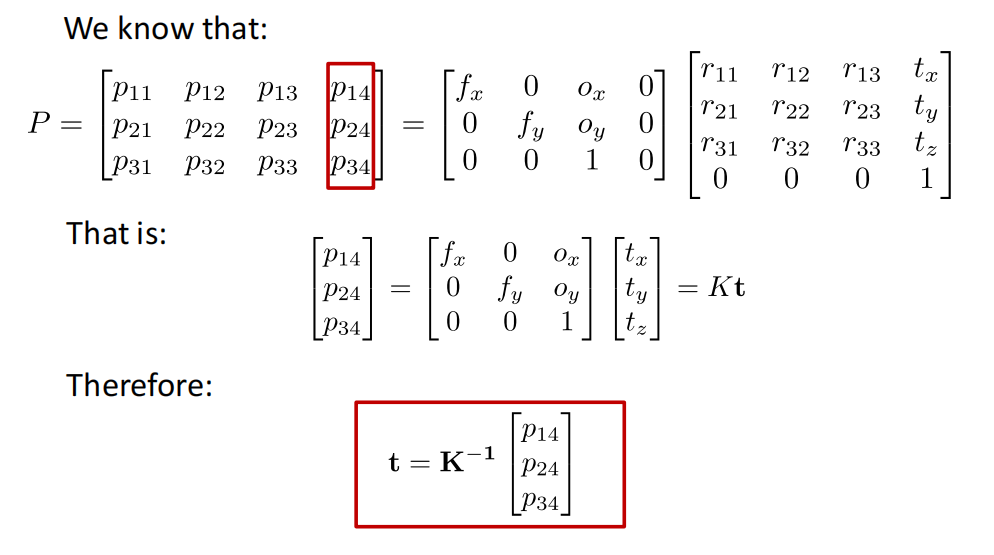
Decompose Projection Matrices to Intrinsic and Extrinsic Matrices¶
- 旋转矩阵是正交的,因为行列式值为1
- QR分解可以将一个矩阵分解成一个上三角矩阵和一个正交阵的乘积
Perspective-n-Point problem¶
假设内参是固定的,只需要通过透视投影信息求出相机的位置和旋转
- 6 unknowns: 3 for rotation, 3 for translation
- Usually called 6DoF pose estimation
- Direct Linear Transform (DLT) 需要6对点
- P3P: using the minimal number of points(3). 需要求解的只有OA, OB, OC,转化后即x,y

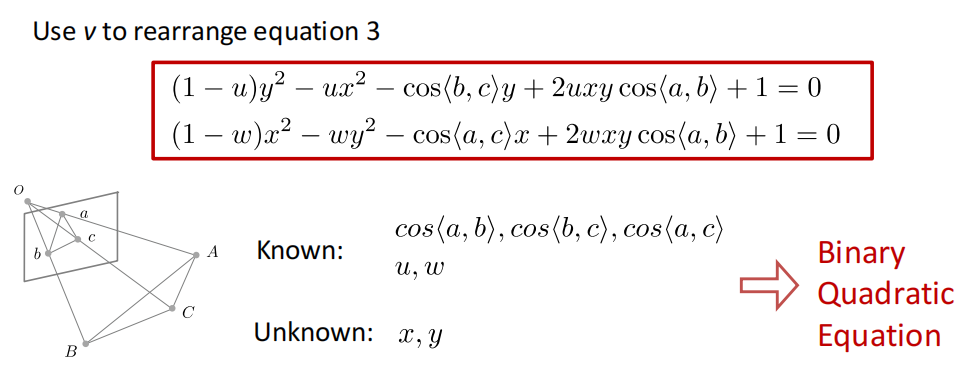
- 这个二元二次方程有四个可能解,我们使用一个额外的点去决定哪个解最有可能
- A more general solution for PnP problem: mminimizing the reprojection error 重投影误差. \(p_i\)为given 2D points,后半部分式子为3D points投影到2D
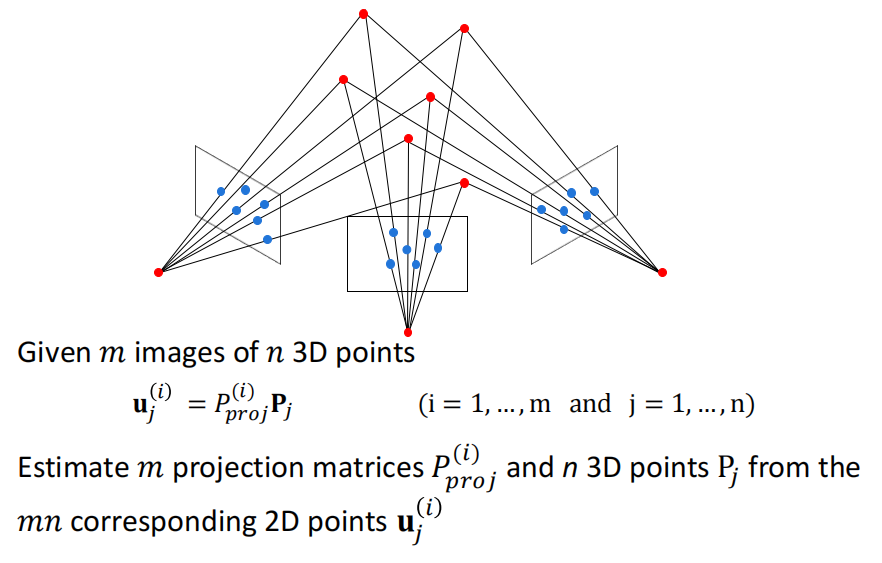
Structure from motion¶
Solving SfM¶
- Assume intrinsic matrix \(K\) is known for each camera
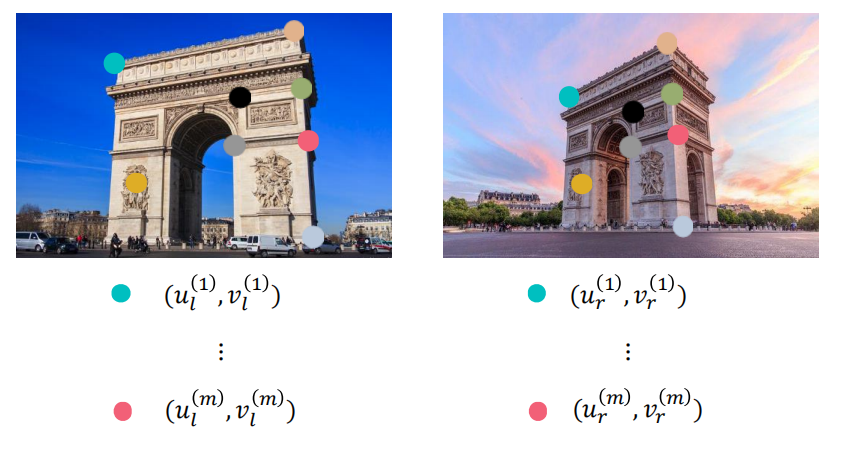
- Find a few reliable corresponding points
- Find relative camera position \(t\) and orientation \(R\)
- Find 3D position of scene points
Epipolar Geometry¶
对极几何描述了两个摄像机拍摄同一场景时,图像之间的几何关系。
-
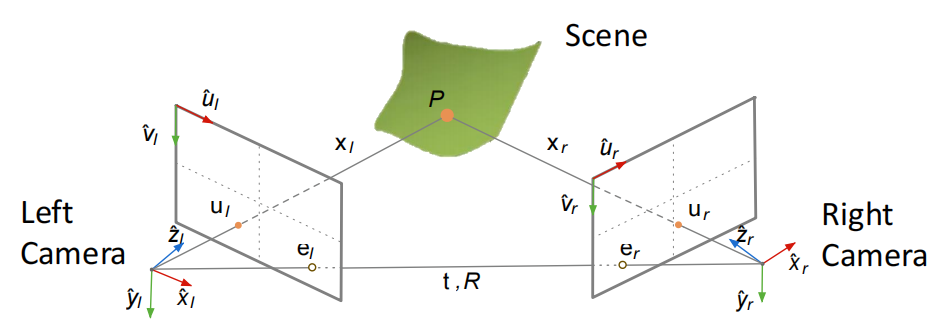
Epipole(极点): Image point of origin/pinhole of one camera as viewed by the other camera.两个相机光心连线与图像平面的交点,相当于另一个相机在这个相机的投影位置
- \(e_l\) 和 \(e_r\) 是对极点。给定相机时是唯一的。
-
Epipolar Plane of Scene Point \(P\): The plane formed by camera origins(\(O_l\) and \(O_r\)), epipoles(\(e_l\) and \(e_r\)) and scene point \(P\).
- 场景中的每个点都位于唯一的极平面上
-
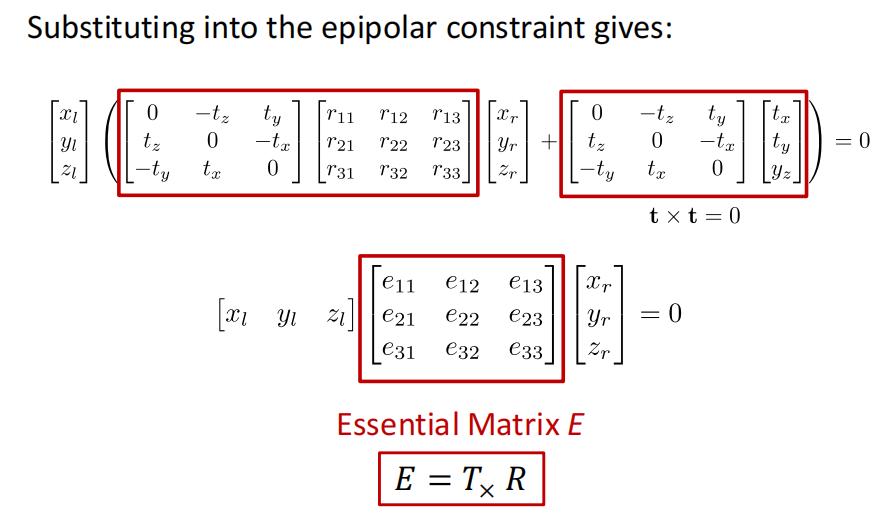
Epipolar Constraint
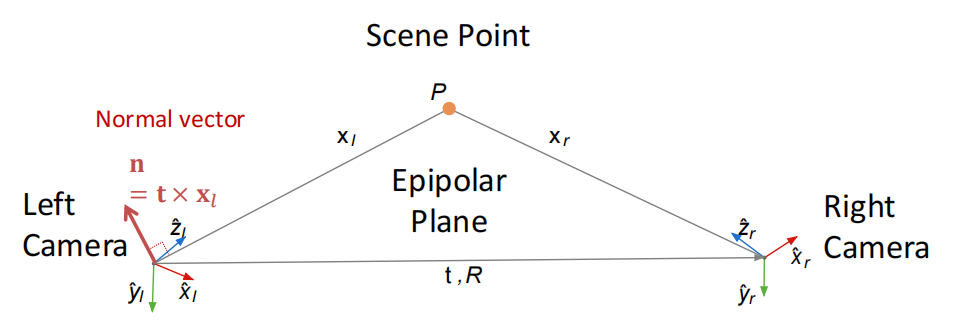
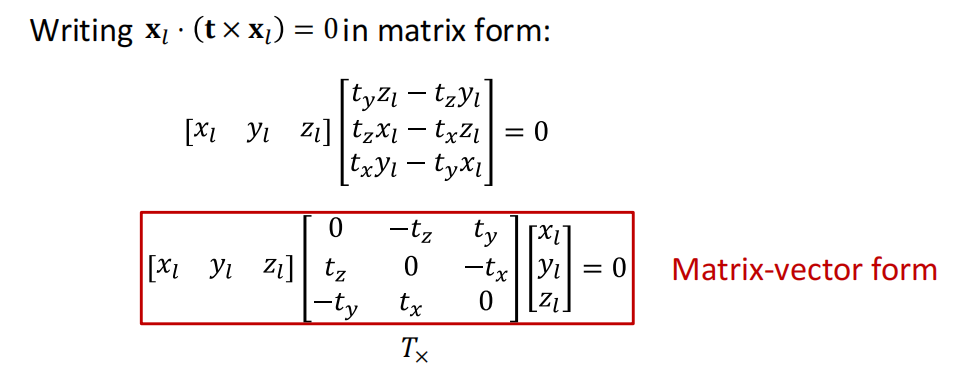
- We know \(x_l=Rx_r+t\),用这个替代右侧的\(x_l\),其中\(R\)和\(t\)是两个相机相对旋转和位置
-
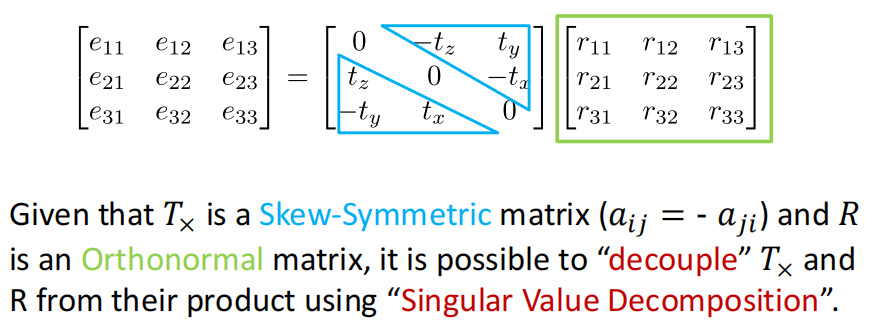
求出\(E\)就可以计算得到\(t\)和\(R\)
-
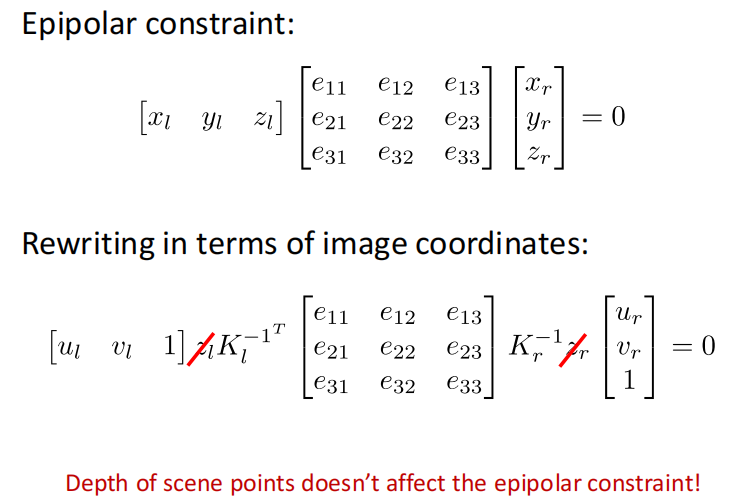
find E: \(x_l^TEx_r=0\)
-
depth of the scene points doesn't affect the epipolar constraint
-
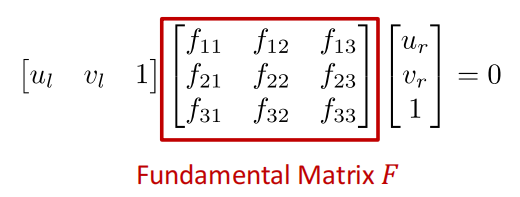
我们把中间三个矩阵记作\(F\),即Fundamental Matrix,则\(E=K_l^TFK_r\)
-
\(F\)同样up to a scale,是尺度不变的,通常我们添加约束\(\|f\|^2=1\)
-
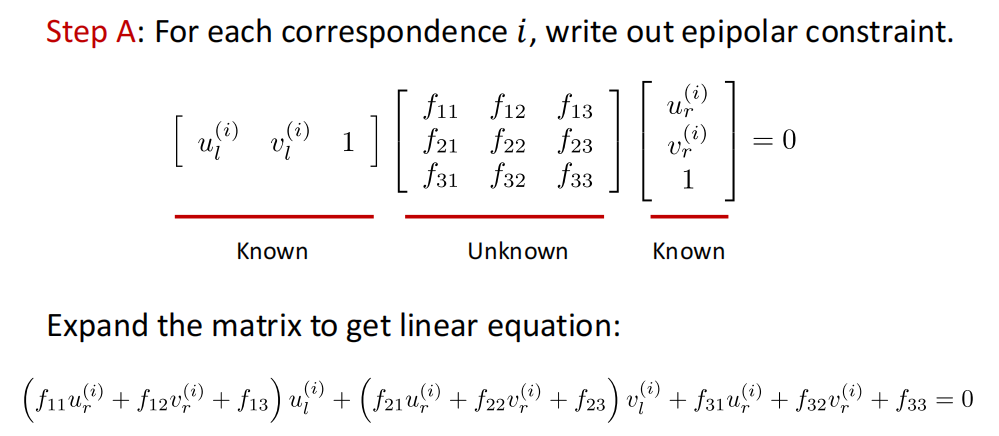
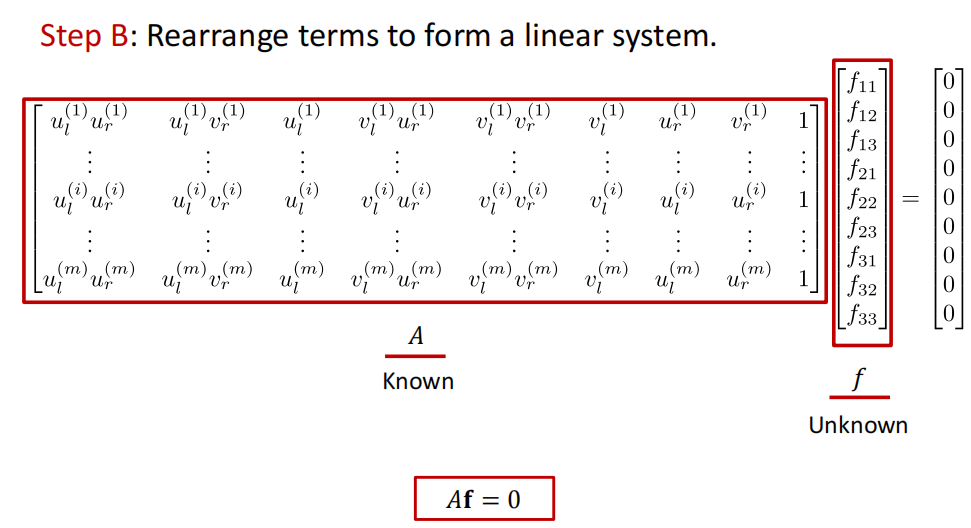
每一对点对应一个线性方程 由于有约束,需要8对点即可
- Step D: 计算\(E\)
- Step E: 分解得到\(R\)和\(t\)
Triangulation¶
Given corresponding 2D feature points and camera parameters, how to find the 3D coordinates of scene points? 给定两个相机的2D坐标和相机的外参内参,如何得到点在相机坐标系的坐标
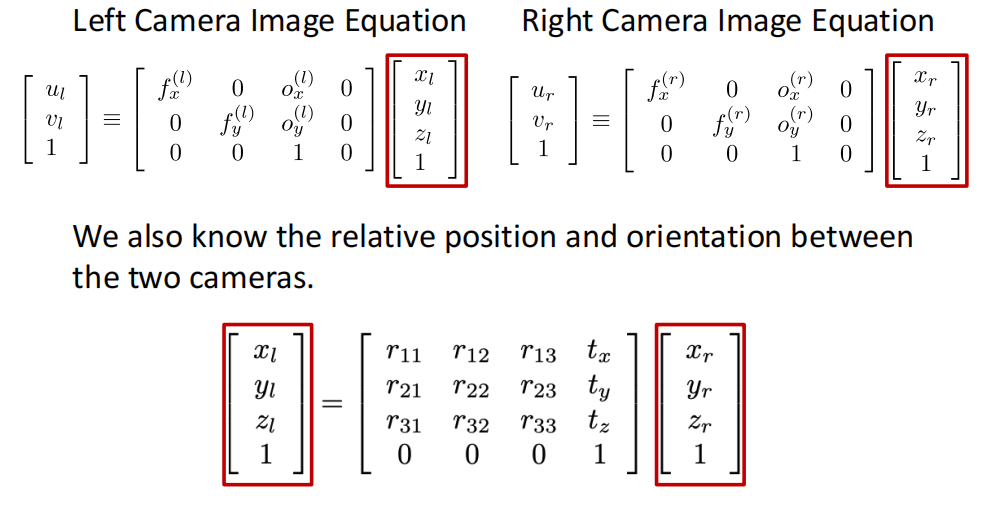
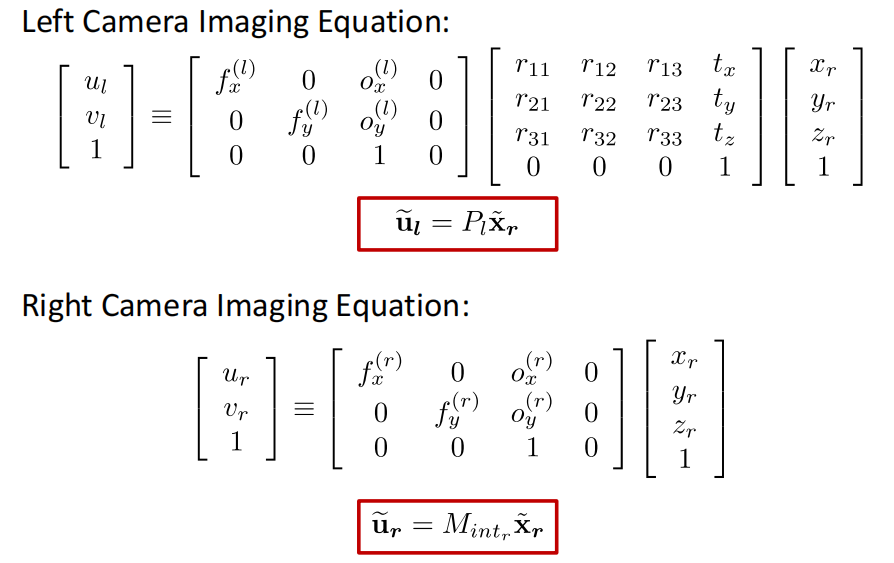
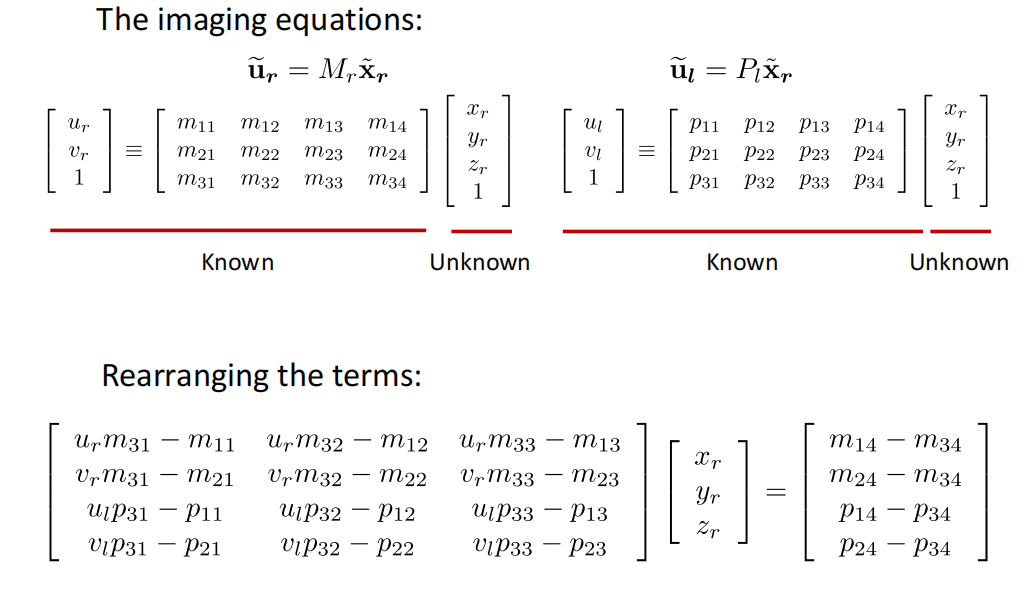
-
以上\(Ax_r =b\), Find least squares solution by \(x_r=(A^TA)^{-1}A^Tb\)
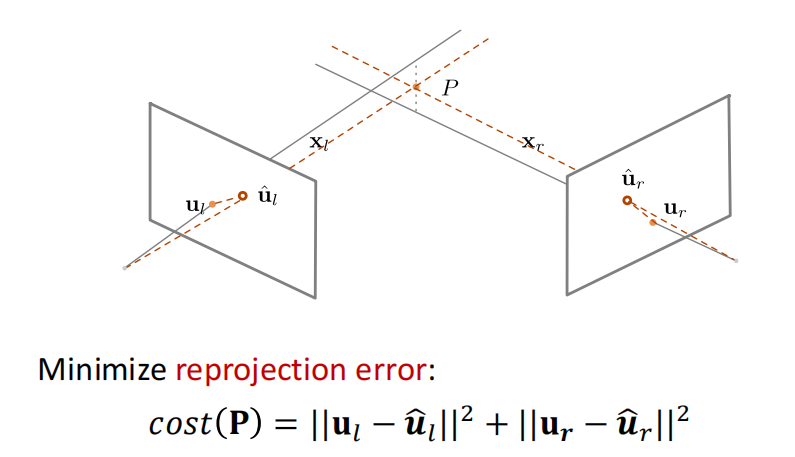
-
triangulation by optimization
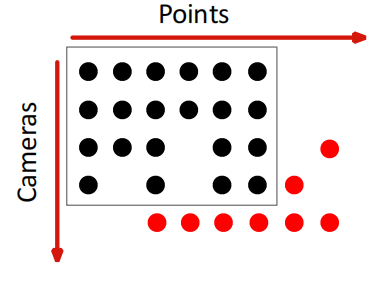
- Multi-frame Structure from Motion
Sequential Structure from Motion¶
-
Initialize camera motion and scene structure
-
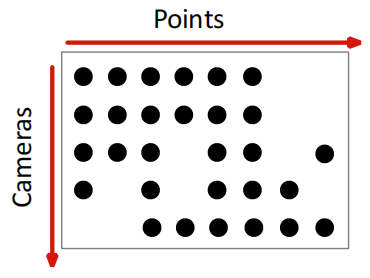
For each additional view
- Determine projection matrix of new camera using all the known 3D points that are visible in its image
- Refine and extend structure: compute new 3D points, reoptimize existing points that are also seen by this camera
- 会出现累计误差
- 可以采用回环检测
-
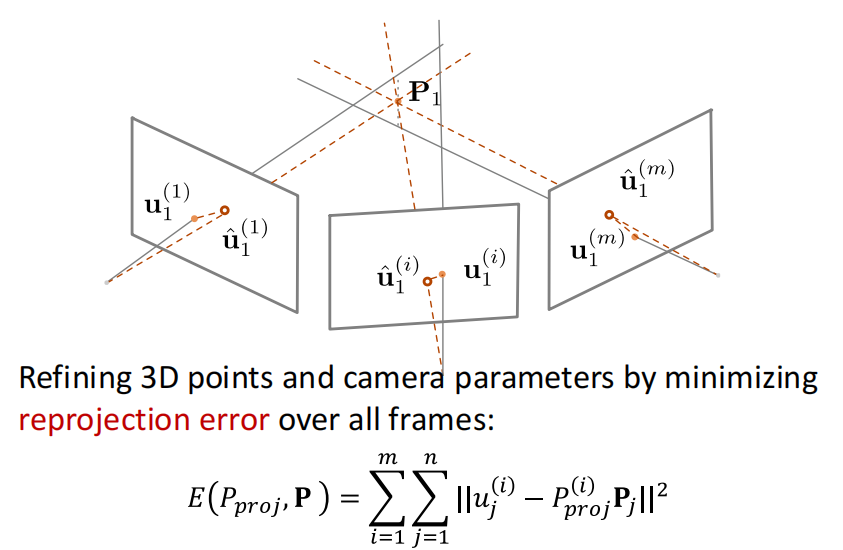
Refine structure and motion: Bundle Adjustment
Incremental SfM pipeline¶
