Lec.06: Image stitching¶
Image Warping¶
-
parametric(global) warping: 所有像素点遵循统一的变换, \(p'=T(p)\)
-
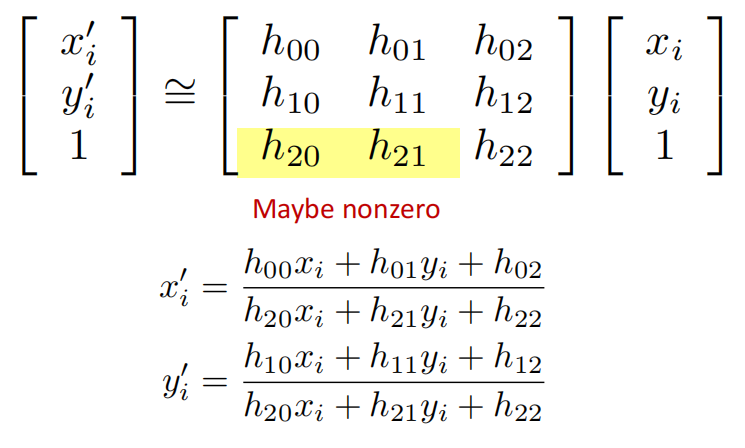
projective transformation(Homography 单应变换): 透视投影、变换
- 自由度为8,因为齐次坐标系下放缩没有影响,我们通常约束\([h_{00}\ h_{01}\dots h_{22}]\)的长度为1
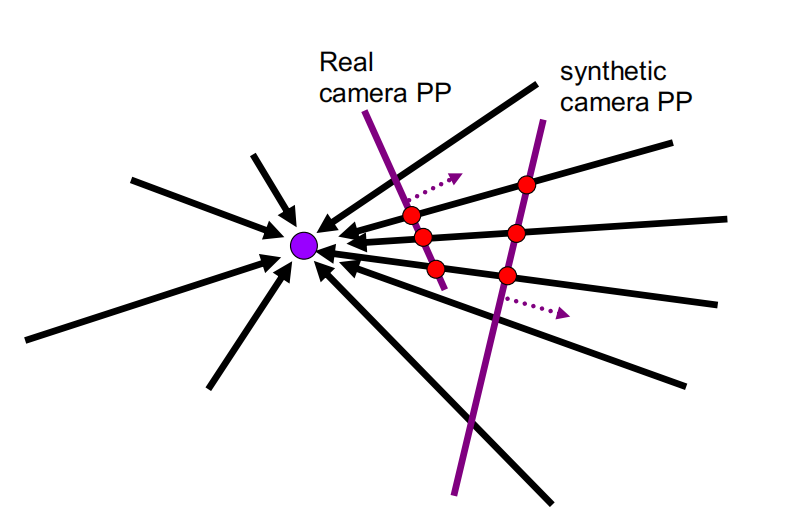
- Change projection plane
-
什么时候是单应变换
- 相机绕其中心转动
- 相机中心移动并且拍摄内容在一个平面上
-
Inverse Transform(\(T^{-1}\)): 将变换图片每个像素点通过逆变换映射到原图的对应的位置,若坐标不为整数则利用插值得到对应像素
Image Stitching¶
-
Affine transformation
\[ \left[\begin{array}{c}x'\newline y'\newline 1\end{array}\right]=\left[\begin{array}{ccc}a&b&c\newline d&e&f\newline 0&0&1\end{array}\right]\left[\begin{array}{c}x\newline y\newline 1\end{array}\right]=\left[\begin{array}{c}ax+by+c\newline dx+ey+f\newline 1\end{array}\right] \]- for each match
\[ x^{\prime}=ax+by+c\newline y^{\prime}=dx+ey+f \]- for \(n\) matches
\[ \left[\begin{array}{cccccc}x_1&y_1&1&0&0&0\newline 0&0&0&x_1&y_1&1\newline x_2&y_2&1&0&0&0\newline 0&0&0&x_2&y_2&1\newline &&\vdots&&&\newline x_n&y_n&1&0&0&0\newline 0&0&0&x_n&y_n&1\end{array}\right]\left[\begin{array}{c}a\newline b\newline c\newline d\newline e\newline f\end{array}\right]=\left[\begin{array}{c}x_1'\newline y_1'\newline \newline x_2'\newline y_2'\newline \newline \vdots\newline x_n'\newline y_n'\end{array}\right] \]-
solve \(t\): find \(t\) that minimizes $$ |At-b |^2 $$
-
solution is given by $$ A^TAt=A^Tb t=(A^TA)^{-1}A^Tb $$
-
projective transformations
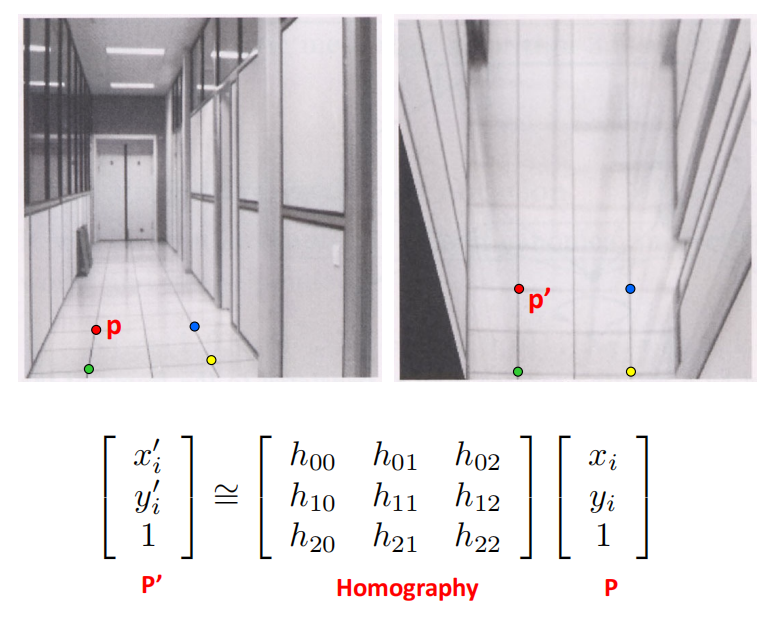
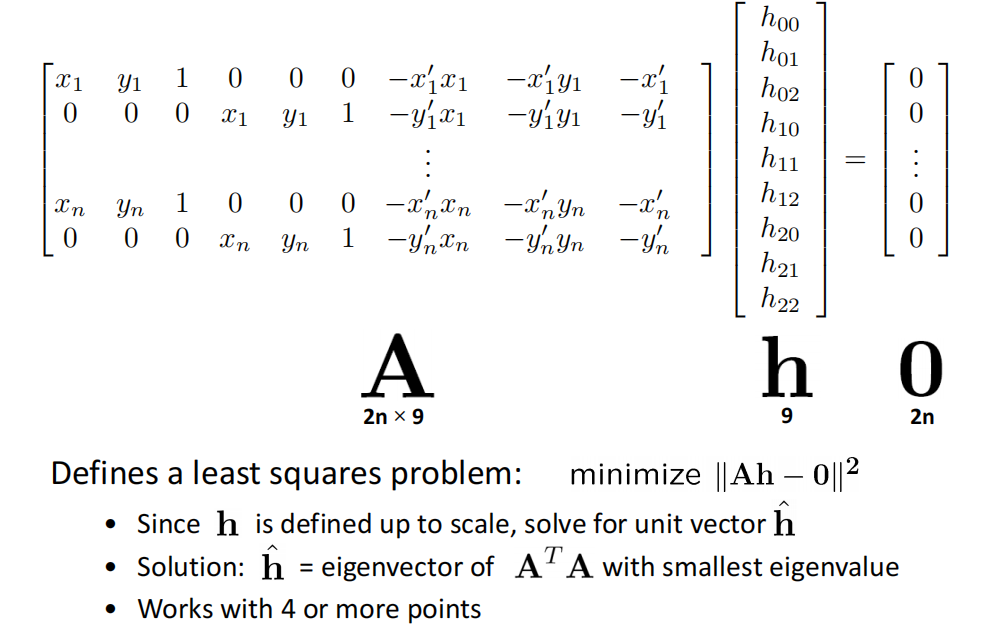
- solving for homographies
$$ x_i'\left(h_{20}x_i+h_{21}y_i+h_{22}\right)=h_{00}x_i+h_{01}y_i+h_{02} $$
$$ y_i'\left(h_{20}x_i+h_{21}y_i+h_{22}\right)=h_{10}x_i+h_{11}y_i+h_{12} $$
$$ \left[\begin{array}{cccccccc}x_i&y_i&1&0&0&0&-x_i'x_i&-x_i'y_i&-x_i'\newline 0&0&0&x_i&y_i&1&-y_i'x_i&-y_i'y_i&-y_i'\end{array}\right]\left[\begin{array}{c}h_{00}\newline h_{01}\newline h_{02}\newline h_{10}\newline h_{11}\newline h_{12}\newline h_{20}\newline h_{21}\newline h_{22}\end{array}\right]=\left[\begin{array}{c}0\newline 0\end{array}\right] $$
-
RANSAC
-
Idea: All the inliers will agree with each other on the translation vector; The outliers will disagree with each other
- RANSAC only has guarantees if there are <50% outliers
-
General version:
-
Randomly choose \(s\) samples - Typically \(s\) = minimum sample size that lets you fit a model
-
Fit a model (e.g., transformation matrix) to those samples
- Count the number of inliers that approximately fit the model
- Repeat \(N\) times
- Choose the model that has the largest set of inliers
- final step: least squares fit: Find average translation vector over all inliers
-
-
-
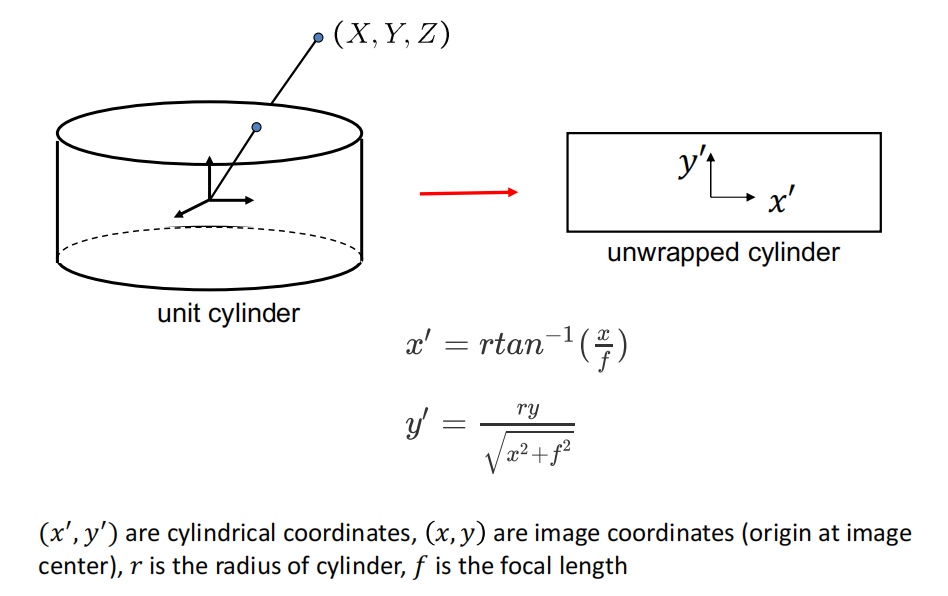
Cylindrical projection 为了做360度的拼接
-
Cylindrical panoramas
- step
- reproject each image onto a cylinder
- blend
- Cylindrical image stitching: A rotation of the camera is a translation of the cylinder!
- problem: Drift
- small errors accumulate over time
- solution: apply correction so that sum=0 for 360° pan
- step