Lec.05: Image Matching and Motion Estimation¶
Image matching¶
-
Main Components of Feature matching
- Detection: identify the interest points
- Description: extract vector feature descriptor surrounding each interest point
- Matching: determine correspondence between descriptors in two views
Detection¶
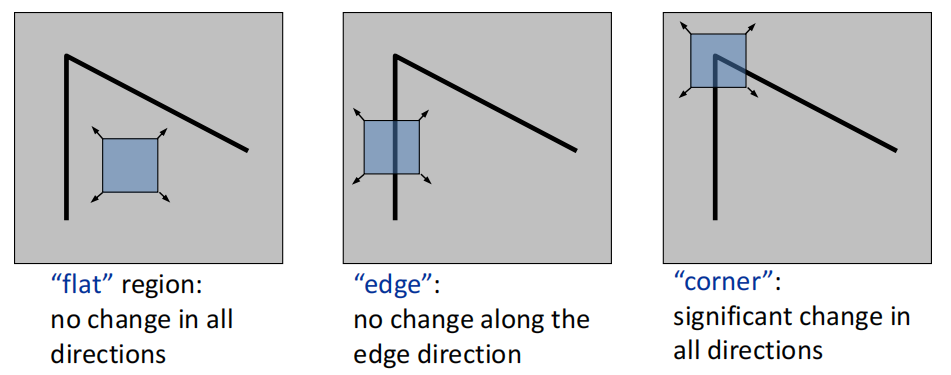
- local measures of uniqueness: consider a small window of pixels (region), shifting the window in any direction causes a big change
-
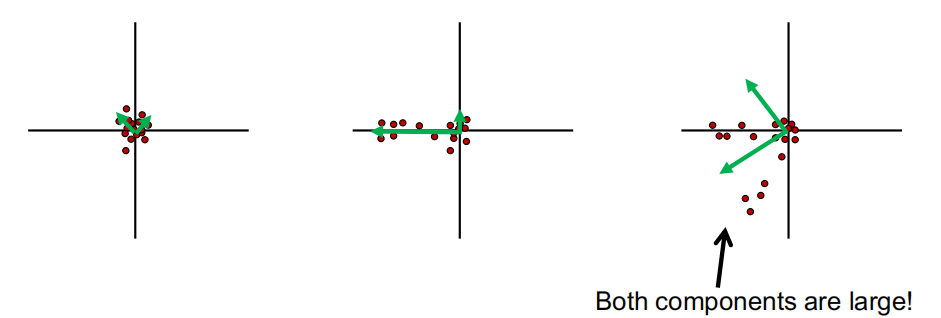
Principal Component Analysis
- The 1st principal component is the direction with highest variance.
- The 2nd principal component is the direction with highest variance which is orthogonal to the previous components.
-
Corner detection
- Compute the covariance matrix at each point。\(w\)为高斯权重,即越中心权重越高
$$ H=\sum_{(u,v)}w(u,v)\left[\begin{array}{cc}{I_{x}^{2}}&{I_{x}I_{y}}\newline {I_{x}I_{y}}&{I_{y}^{2}}\newline \end{array}\right]\quad I_{x}=\frac{\partial f}{\partial x},I_{y}=\frac{\partial f}{\partial y} $$
-
二维情况下特征值有解析解 $$ H=\begin{bmatrix}a b\newline c d\end{bmatrix}\quad\lambda_{\pm}=\frac{1}{2}\left((a+d)\pm\sqrt{4bc+(a-d)^{2}}\right) $$
-
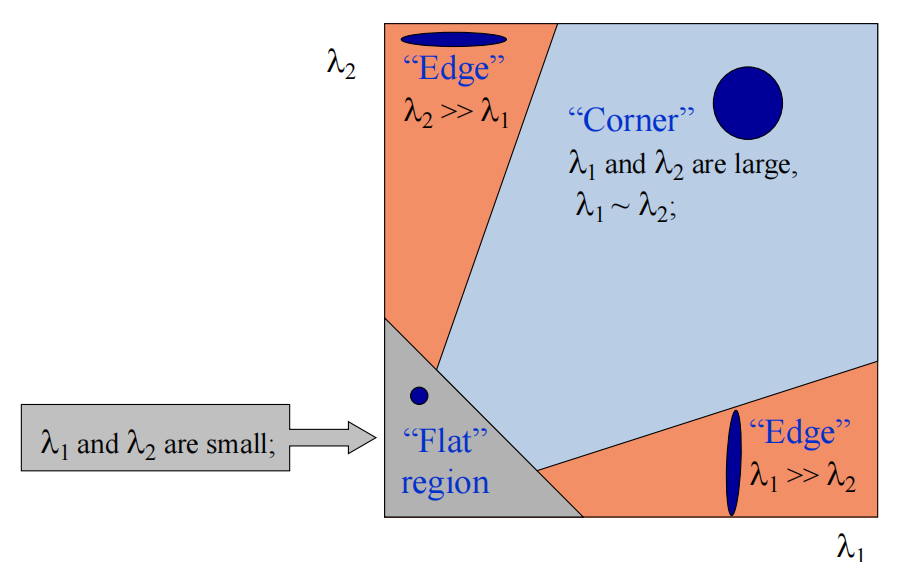
Classify points using eigenvalues of \(H\)
-
简化,我们可以使用Harris operator。通过设置threshold进行二值化。最后找到response function的局部最大值 $$ f=\frac{\lambda_1\lambda_2}{\lambda_1+\lambda_2}=\frac{determinant(H)}{trace(H)} $$
-
Harris detector - Compute derivatives at each pixel - Compute covariance matrix \(H\) in a Gaussian window around each pixel - Compute corner response function \(f\) - Threshold \(f\) - Find local maxima of response function (nonmaximum suppression)
-
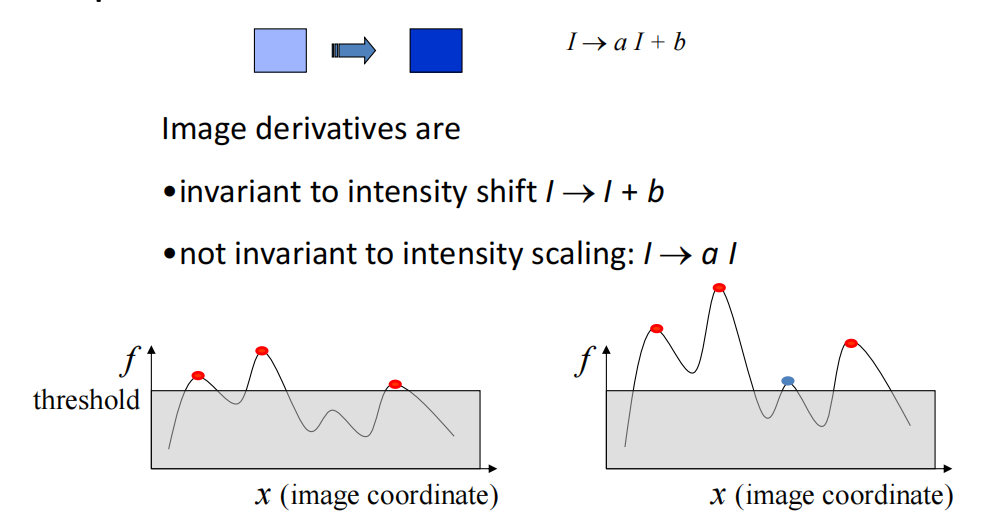
特征点的可重复性: We want response value \(f\) at the corresponding pixels to be invariant to image tran sformations
- Intensity change(亮度):极值会变,极值点不会, partially invarient
-
平移、旋转: 不变
-
缩放:corner response对缩放不是invariant的。
-
对仿射变换和非线性亮度变换也不是不变的
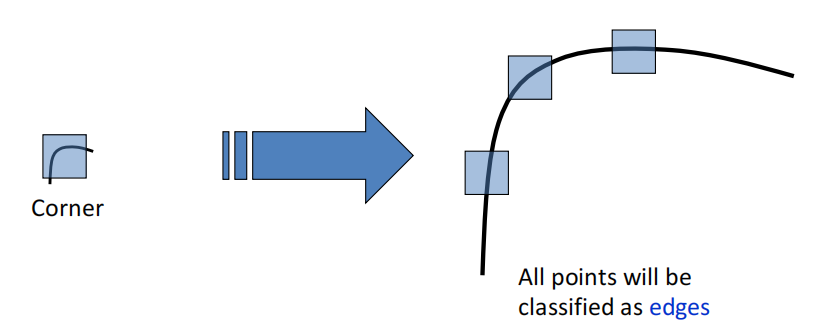
- solution:在不同窗口大小下计算
- implementation: Instead of computing \(f\) for larger and larger windows, we can implement using a fixed window size with an image pyramid

-
Blob detector:斑点在亮度图中二阶导值较大
-
Laplacian filter
- \(\nabla^2=\frac{\partial^2}{\partial x^2}+\frac{\partial^2}{\partial y^2}\)
- 近似
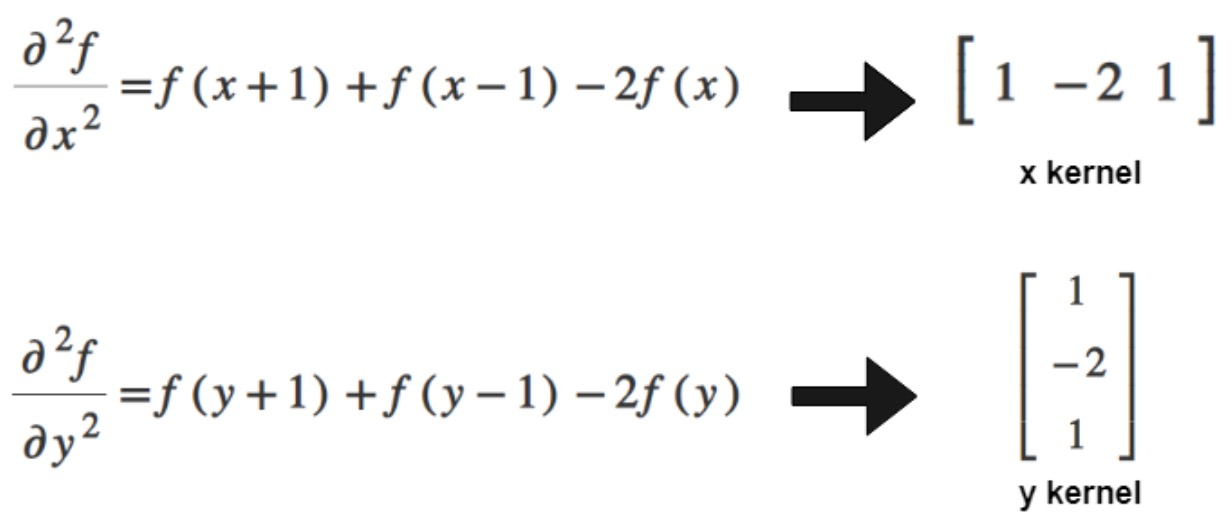
- 加起来得到Laplacian filter
-
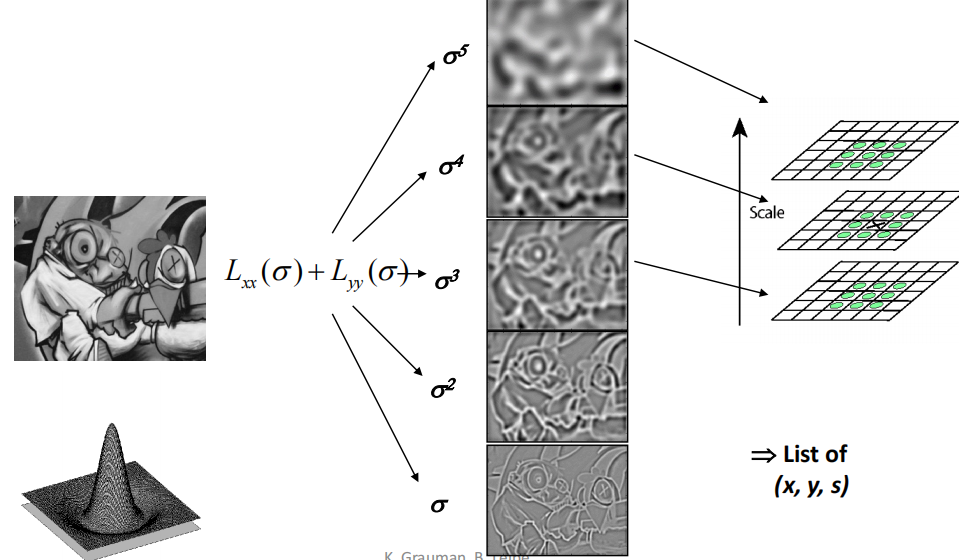
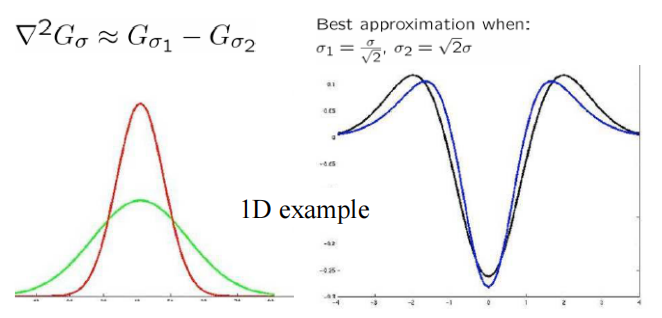
Laplacian对noise敏感,通常使用Laplacian of Gaussian(LoG) filter,利用高斯核smooth image
- implementation: \(\nabla^2(f*g)=f*\nabla^2g\), \(g\) 为2D Gaussian function. The scale of LoG is controlled by \(\sigma\) of Gaussian
-
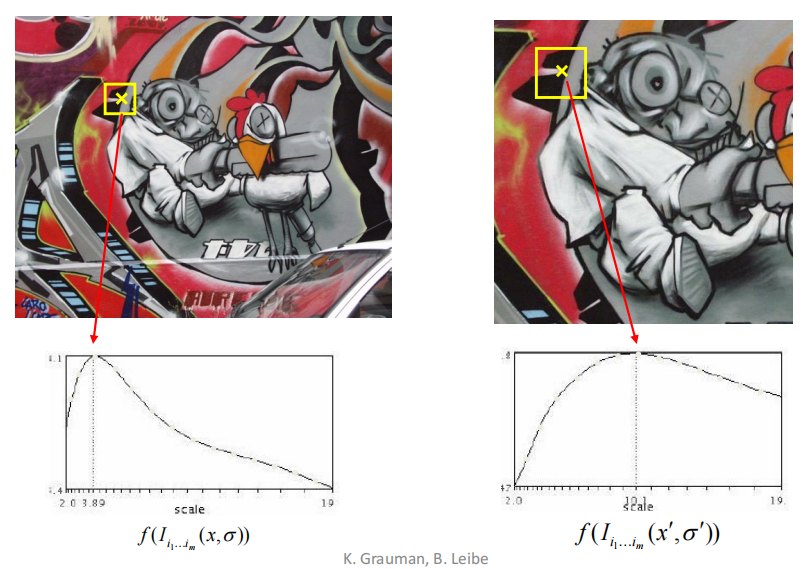
Scale selection: Feature points are local maxima in both position and scale. 把scale作为第三维度
-
-
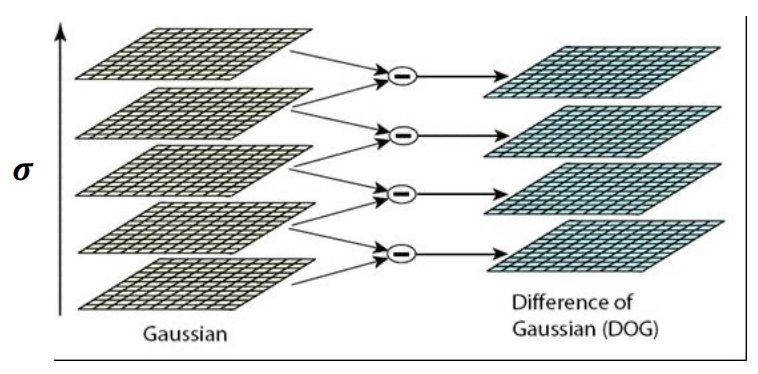
DoG: LoG can be approximated by Difference of two Gaussians (DoG) OpenCV中常用
- computing DoG at different scales 在图像金字塔中对不同\(\sigma\)相减就可以得到不同scale下的DoG
Description¶
-
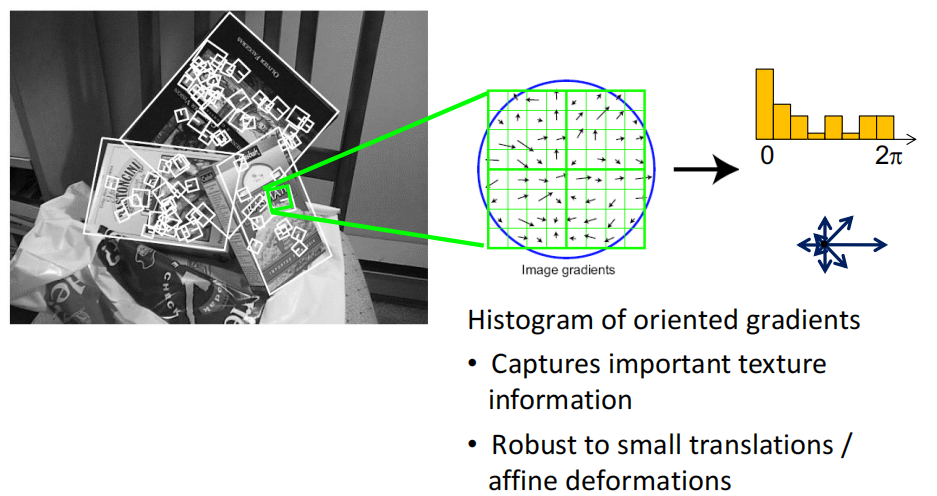
SIFT(Scale Invarient Feature Transform) descriptor:考察region内梯度方向的分布,用直方图作为描述子
- 平移不发生变化
- 旋转柱状图整体平移。处理:归一化,最大的放最左侧
- 缩放:窗口大小由DoG detector检测特征点时决定,因此invariant
- algorithm:DoG找到maxima,对旋转进行dominate orientation,最后create descriptor
-
Properties of SIFT: Extraordinarily robust matching technique
- Can handle changes in viewpoint: Theoretically invariant to scale and rotation
- Can handle significant changes in illumination: Sometimes even day vs. night
- Fast and efficient: can run in real time
- Lots of code available
Matching¶
-
Feature distance:
- simple approach \(\|f_1-f_2\|\), can give small distances for ambiguous (incorrect) matches
- ratio test: ratio score = \(\dfrac{\|f_1-f_2\|}{\|f_1-f_2'\|}\)
- \(f_2\)是best match, \(f_2'\)是2nd best match
- 很接近1说明很近似,则不对此点进行匹配
-
Another strategy: find mutual nearest neighbors 即找到一对特征点,彼此互为图中最近似的点
-
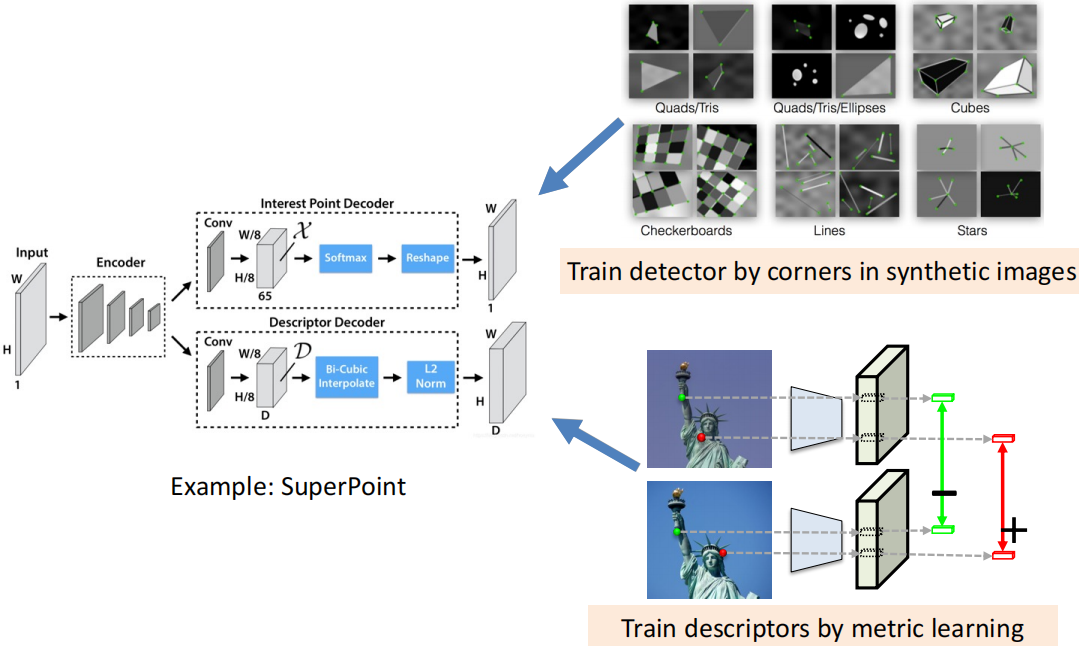
Deep Learning
Motion estimation¶
-
problem
- feature-tracking: 提取追踪特征点,输出点的位移信息
- optical flow:恢复每个像素处的图像运动,输出密集位移场(光流)
Lucas-Kanade method¶
-
Key assumptions
-
small motion: poitns do not move very far
-
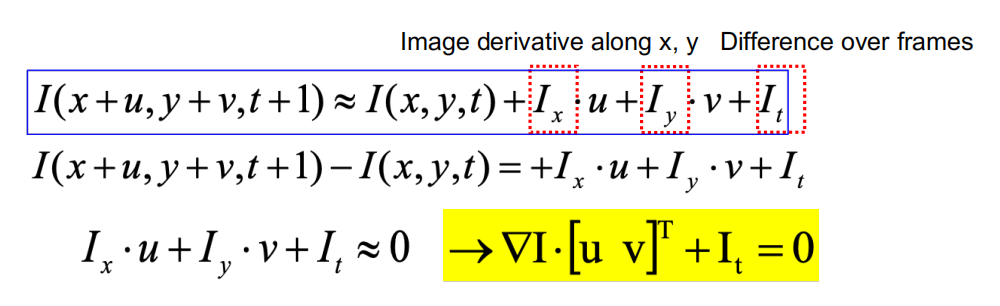
brightness constancy: same point looks the same in every frame
- \(I(x,y,t)=I(x+u,y+v,t+1)\)
- Taylor expansion assuming small motion
- 这样1个方程,但是有2个参数,我们需要更多的方程,就有了第三个假设
-
spatial coherence: points move like their neighbors
- assume the pixel's neighbors have the same \((u,v)\)
- for \(5\times5\) window, that gives us 25 equations per pixel
\[ \left.\left[\begin{array}{cc}I_x(\mathbf{p_1})&I_y(\mathbf{p_1})\newline I_x(\mathbf{p_2})&I_y(\mathbf{p_2})\newline \vdots&\vdots\newline I_x(\mathbf{p_{25}})&I_y(\mathbf{p_{25}})\end{array}\right.\right]\left[\begin{array}{c}u\newline v\end{array}\right]=-\left[\begin{array}{c}I_t(\mathbf{p_1})\newline I_t(\mathbf{p_2})\newline \vdots\newline I_t(\mathbf{p_{25}})\end{array}\right] \]- 即\(Ad=b\),方程个数远多于变量,很可能没解,因此solve \(\min\limits_d\|Ad-b\|^2\)
- 即\((A^TA)d=A^Tb\)
\[ \left[\begin{array}{cc}\sum I_xI_x&\sum I_xI_y\newline \sum I_xI_y&\sum I_yI_y\end{array}\right]\left[\begin{array}{c}u\newline v\end{array}\right]=-\left[\begin{array}{c}\sum I_xI_t\newline \sum I_yI_t\end{array}\right] \]-
有解左侧要可逆,对应两个特征值\(\lambda_1\)和\(\lambda_2\)不能太小,对应之前提到的边缘检测,需要是corner点
-
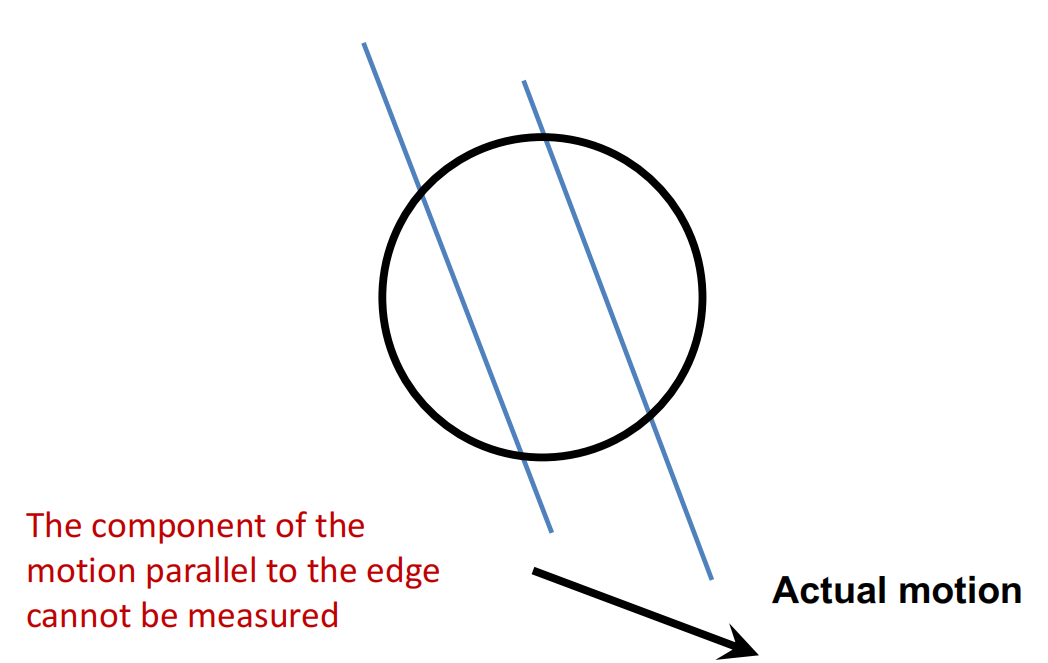
The aperture problem 无法判断沿孔径方向的运动
-
-
好跟踪的点:纹理丰富的点
-
Errors in Lukas-Kanade
-
Brightness constancy is not satisfied 如开关灯、进出隧道
- solution: 梯度是不变的
-
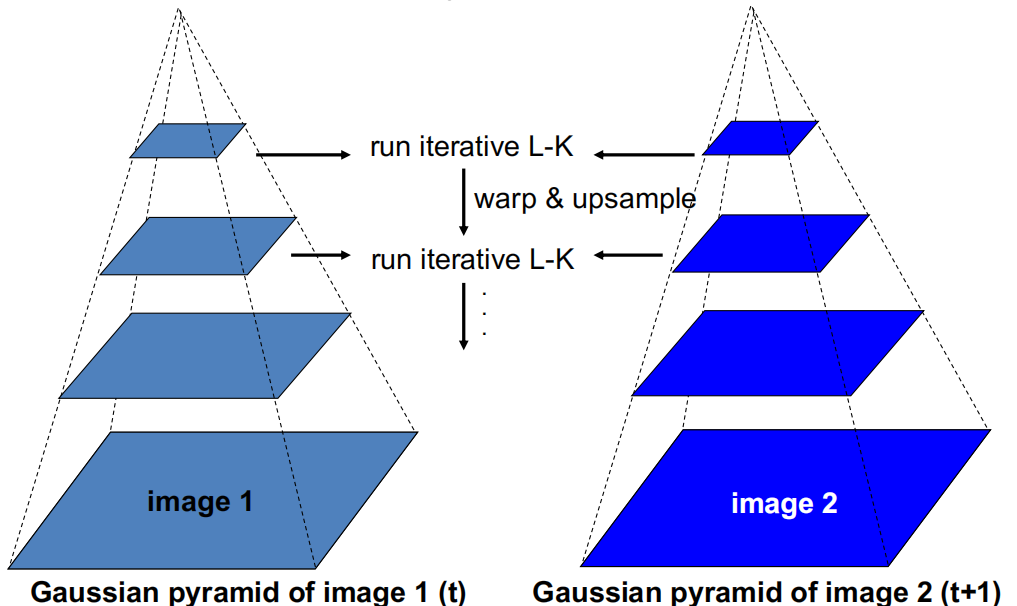
The motion is not small 跑步的人
- solution: 降低分辨率, coarse-to-fine optical flow estimation
-
A point does not move like its neighbors 边缘
-